Gazebo robotverseny
A leírás egy középiskolásoknak szóló roboversenyre készült, de egyetemi környezetben is használható. A github.com/sze-info/racecar_gazebo a github.com/robotverseny/racecar_gazebo forkja, az pedig szintén forkolva lett a University of Virginia repojáról. A támogatott operációs rendszer Ubuntu 18.04, az ROS verzió pedig melodic.
A szükésges csomagok így telepíthetőek:
sudo apt-get -y install ros-melodic-ros-control ros-melodic-gazebo-ros-control ros-melodic-ros-controllers ros-melodic-navigation qt4-default ros-melodic-ackermann-msgs ros-melodic-serial ros-melodic-teb-local-planner* ros-melodic-tf-conversions zip unzip ros-melodic-jsk-rviz-plugins python3-catkin-tools
Készítsünk egy külön workspace-t (‘sim_ws’), hogy később könnyen törölhessük, ha már nem kell.
cd ~
mkdir -p sim_ws/src
cd ~/sim_ws/src
git clone https://github.com/sze-info/racecar_gazebo
cd ~/sim_ws
catkin build
Adjuk meg bashrc-ben a szimulátorhoz szükséges modellek elérési útvonalát.
echo "export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/sim_ws/src/racecar_gazebo/f1tenth/virtual/dependencies/racecar_gazebo/models" >> ~/.bashrc
source ~/.bashrc
Hogy ne kelljen minden terminalban megadnunk a workspace-t, tegyük azt is a bashrc-be. Ha ezt nem szerenénk, elég mindig kiadni a source ~/sim_ws/devel/setup.bash parancsot.
echo "source ~/sim_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
A csomagok telepítését és a workspace létrehozását bemutató videó itt érhető el: youtu.be/cXABl5jbmVc
Képek a szimulátroból:
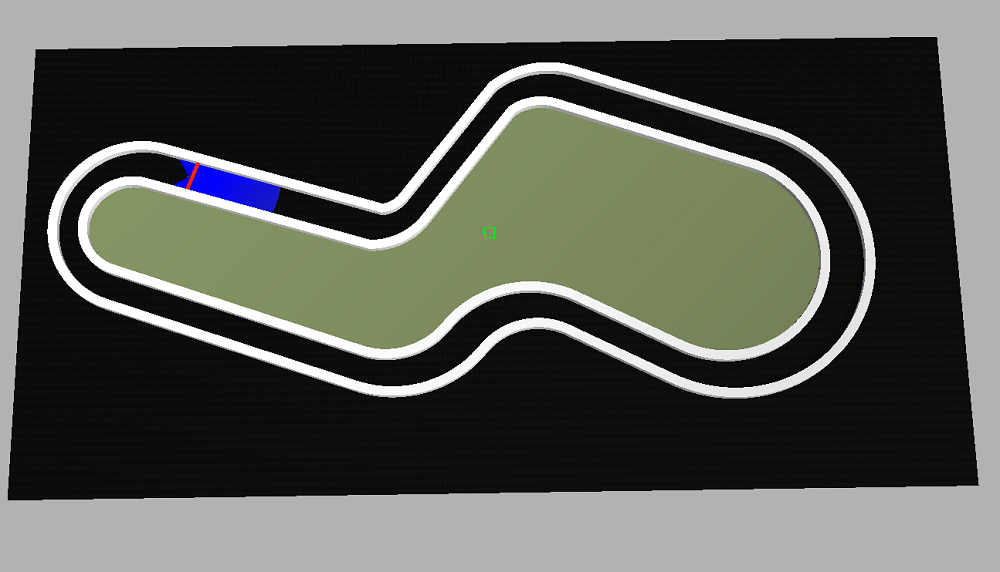
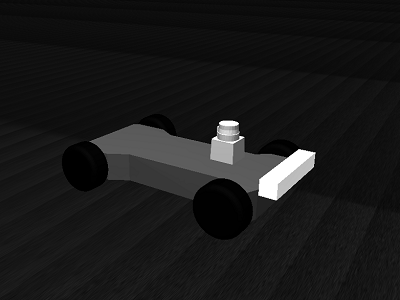
![]()
Később, ha a verseny után már nem szükséges, a bashrc-ből törölhető ez a sor, nyissuk meg vs code-ból: code ~/.bashrc, majd a fájl utolsó soraiból töröljük a korábban hozzáadottat.