Tartalom
Mermaid gyakorlás
A mermaid hasznos kiegészője lehet a markdown fájlainknak (pl README.md). Különböző grafikononokat, flowchartokat tudunk vele viszonylag könnyen létrehozni.
VS code extension
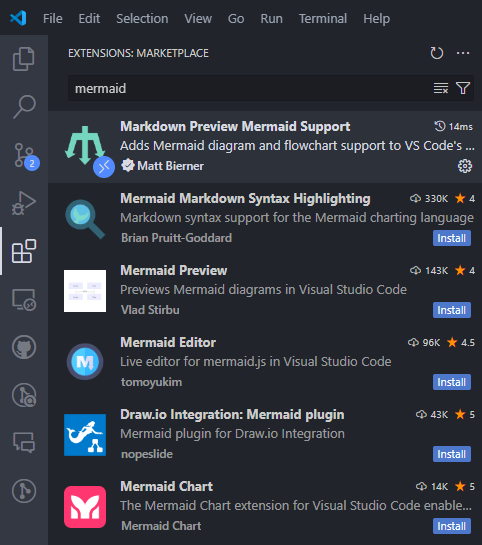
Bal oldalt az Extension ikonra kattintva vagy a Ctrl + Shift + X után a meraid kulcsszót beírva előjön a Markdown Preview kiegészítő, ez egy katintással telepíthető és használhat is. Ezután a Markdown előnézetében (Ctrl + Shift + V vagy felső ikon) már látható is lesz az előlnézet.
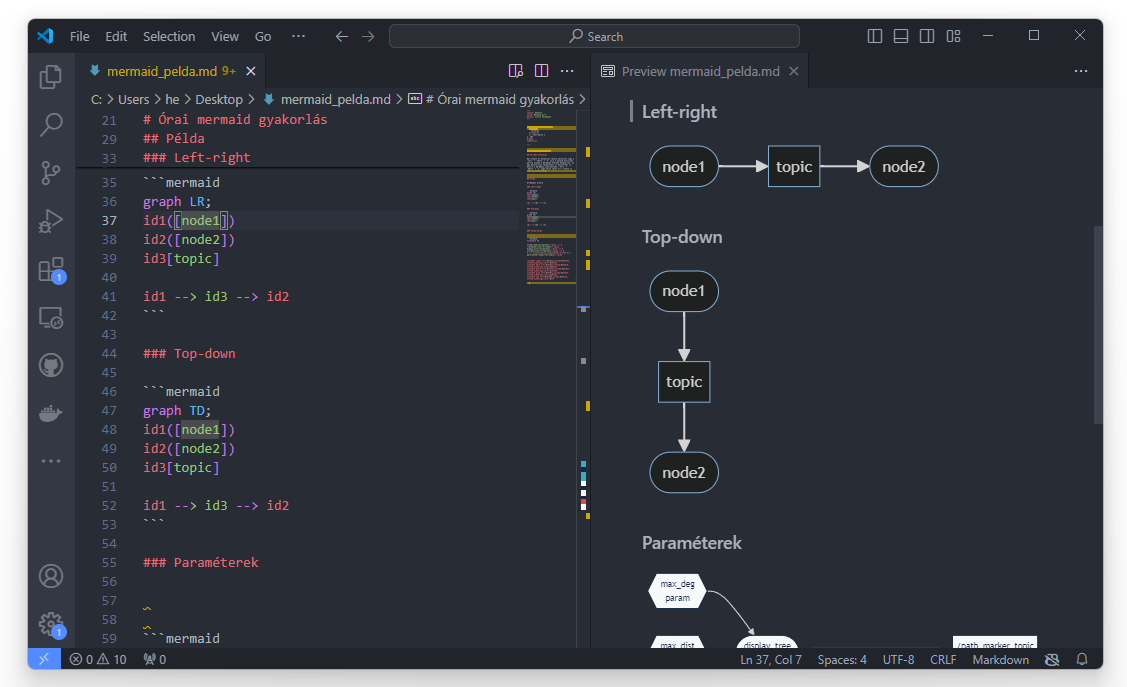
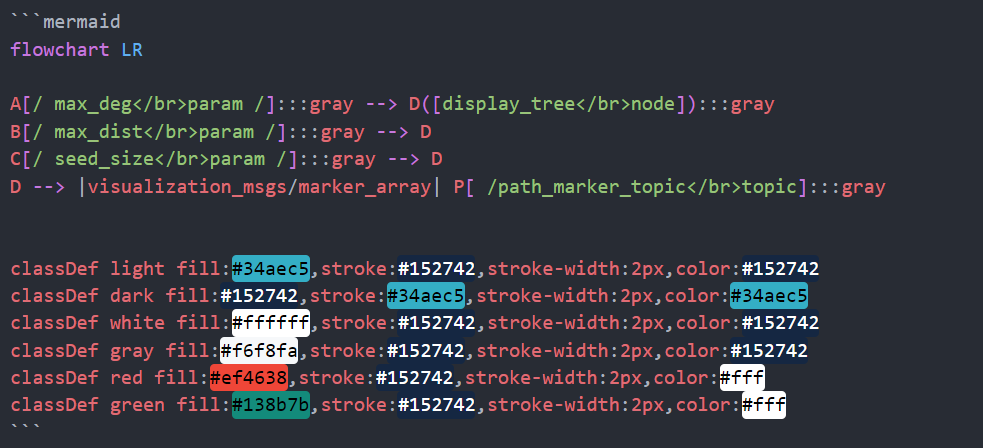
Célszerű a Mermaid Markdown Syntax Highlighting és a Color Highlight extension-t is használni, ekkor a következőképp jelenik meg a gráf kódja:
Példák
Egyszerű példa
Ay egyik legegyszerűbb flowchart kódja következő 2 sorból áll:
graph LR;
node1 --> topic --> node2
Az első sor a gráf típusa, a második (vagy további) sorokban a kapcsolatokat --> a nyilak definiálják.
graph LR;
node1 --> topic --> node2
Téglalap helyett formákkal
Az LR a left-right rövidítése. A formák lehetnek lekerekítettek ([ ]), szögletesek [ ], hexagonok {{ }} paralellogrammák [/ /] és továbbiak is. ROS-ben megtanultuk, hogy a node lekerekített, míg a topic szögletes. Az azonosítókat itt pl: id1, id2, id3 a zárójel elé lehet írni. A kapcsolatkoat vagy külön sorban (mint itt) vagy egy sorban (későbbi példa) is definiálhatjuk.
graph LR;
id1([node1])
id2([node2])
id3[topic]
id1 --> id3 --> id2
graph LR;
id1([node1])
id2([node2])
id3[topic]
id1 --> id3 --> id2
Balról jobbra helyett fentről lefele
Az TD a top-down rövidítése:
graph TD;
id1([node1])
id2([node2])
id3[topic]
id1 --> id3 --> id2
graph TD;
id1([node1])
id2([node2])
id3[topic]
id1 --> id3 --> id2
Színek használata
classDef segítségével színeket, vonalakat, definálhatunk, majd 3 db kettőspont után ::: azonosíthatjuk a megfelelő osztályhoz:
graph TD;
id1([node1]):::red
id2([node2]):::red
id3[topic]:::light
id1 --> id3 --> id2
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
graph TD;
id1([node1]):::red
id2([node2]):::red
id3[topic]:::light
id1 --> id3 --> id2
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Több node és topic
További, több node-ot és topicot tartalmazó példa:
graph LR;
gen([ /gen_node]) --> sine
gen --> rand[ /rand<br/>std_msgs/Float32]
sine[ /sine<br/>std_msgs/Float32] --> sum([ /sum_node])
sum --> out[ /out<br/>std_msgs/Float32]
rand --> sum
in[ /in<br/>std_msgs/Float32] --> sum
graph LR;
gen([ /gen_node]) --> sine
gen --> rand[ /rand<br/>std_msgs/Float32]
sine[ /sine<br/>std_msgs/Float32] --> sum([ /sum_node])
sum --> out[ /out<br/>std_msgs/Float32]
rand --> sum
in[ /in<br/>std_msgs/Float32] --> sum
Az előbbi példa, csak színekkel
graph LR
gen([ /gen_node]):::red --> sine
gen --> rand[ /rand<br/>std_msgs/Float32]:::light
sine[ /sine<br/>std_msgs/Float32]:::light --> sum([ /sum_node]):::red
sum --> out[ /out<br/>std_msgs/Float32]:::light
rand --> sum
in[ /in<br/>std_msgs/Float32]:::light --> sum
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
graph LR
gen([ /gen_node]):::red --> sine
gen --> rand[ /rand<br/>std_msgs/Float32]:::light
sine[ /sine<br/>std_msgs/Float32]:::light --> sum([ /sum_node]):::red
sum --> out[ /out<br/>std_msgs/Float32]:::light
rand --> sum
in[ /in<br/>std_msgs/Float32]:::light --> sum
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Alternatív verzió class használatára
A három ::: pont helyett egyszerűen a class kulcsszó után felsorolhatjuk az osztályokat:
graph LR
gen([ /gen_node]) --> sine
gen --> rand[ /rand<br/>std_msgs/Float32]
sine[ /sine<br/>std_msgs/Float32] --> sum([ /sum_node])
sum --> out[ /out<br/>std_msgs/Float32]
rand --> sum
in[ /in<br/>std_msgs/Float32] --> sum
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
class gen,sum red
class rand,sine,in,out light
graph LR
gen([ /gen_node]) --> sine
gen --> rand[ /rand<br/>std_msgs/Float32]
sine[ /sine<br/>std_msgs/Float32] --> sum([ /sum_node])
sum --> out[ /out<br/>std_msgs/Float32]
rand --> sum
in[ /in<br/>std_msgs/Float32] --> sum
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
class gen,sum red
class rand,sine,in,out light
flowchart LR
A[/ max_deg</br>param /]:::gray --> D([display_tree</br>node]):::gray
B[/ max_dist</br>param /]:::gray --> D
C[/ seed_size</br>param /]:::gray --> D
D --> |visualization_msgs/marker_array| P[ /path_marker_topic</br>topic]:::gray
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef gray fill:#f6f8fa,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Paraméterek
Gyakran jól jön a definiált paraméterek vizualizálása. Erre jelen tudásunk szerint nincs szabványos jelölés hexagonok {{ }} vagy paralellogrammák [/ /] lehetnek az opciók.
flowchart LR
A[/ max_deg</br>param /]:::gray --> D([display_tree</br>node]):::gray
B[/ max_dist</br>param /]:::gray --> D
C[/ seed_size</br>param /]:::gray --> D
D --> |visualization_msgs/marker_array| P[ /path_marker_topic</br>topic]:::gray
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef gray fill:#f6f8fa,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
classDef green fill:#138b7b,stroke:#152742,stroke-width:2px,color:#fff
Rendszerterv
flowchart TD
S[State Machine <br>/plan_state_machine] -.->|/plan_state*| LS[LIDAR segementation<br>/prcp_ground_obstacle_segm_lidar]
S -.-> CS[Cone detection camera<br> and de-projection]
S -.-> O[Object fusion]
CS -->|/prcp_obj_list_camera| O
LS -->|/prcp_obj_list_lidar| O
O -->|/prcp_obj_list_fused| T[Trajectory planner<br>/plan_trajectory_planner]
T --> C[Control<br>/ctrl_vehicle_control]
S -.-> T
S -.-> C
O --> M[Map Creation<br>/prc_slam]
M -->|/prcp_map| T
L[Localization<br>/prcp_odometry_kf_prediction] --> T
C --> CAN[To CAN]
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
classDef green fill:#138b7b,stroke:#152742,stroke-width:2px,color:#fff
class CS,LS,L,T,M,C white
class O light
class S dash
class CAN red
flowchart TD
S[State Machine <br>/plan_state_machine] -.->|/plan_state*| LS[LIDAR segementation<br>/prcp_ground_obstacle_segm_lidar]
S -.-> CS[Cone detection camera<br> and de-projection]
S -.-> O[Object fusion]
CS -->|/prcp_obj_list_camera| O
LS -->|/prcp_obj_list_lidar| O
O -->|/prcp_obj_list_fused| T[Trajectory planner<br>/plan_trajectory_planner]
T --> C[Control<br>/ctrl_vehicle_control]
S -.-> T
S -.-> C
O --> M[Map Creation<br>/prc_slam]
M -->|/prcp_map| T
L[Localization<br>/prcp_odometry_kf_prediction] --> T
C --> CAN[To CAN]
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
classDef green fill:#138b7b,stroke:#152742,stroke-width:2px,color:#fff
class CS,LS,L,T,M,C white
class O light
class S dash
class CAN red
Körcikk
Az metrics.ros.org/rosdistro_rosdistro.html alapján egy körcikk diagram:
pie title ROS distros used
"Melodic (ROS 1)" : 0.0010
"Noetic (ROS 1)" : 0.0951
"Humble" : 0.3333
"Iron" : 0.1905
"Rolling" : 0.1904
pie title ROS distros used
"Melodic (ROS 1)" : 0.001
"Noetic (ROS 1)" : 0.095
"Humble" : 0.33
"Iron" : 0.19
"Rolling" : 0.19