Tartalom
Ignition Gazebo Fortress
Az Ignition Gazebo Fortress egy long-term support (LTS) release 2026 szeptemberéig támogatva. ROS 2 Humble kiadással kompatibilis, lásd a kompatibiltási mátrixot.
Telepítés
Ajánlott az Ubuntu és a binary telepítés: gazebosim.org/docs/fortress/install_ubuntu. Természetesen az előző linken továbbkattintva elérhetőek a Windowsos illetve a forráskódból fordított verziók is.
ROS 2 integráció
- gazebosim.org/docs/fortress/ros2_integration
- github.com/gazebosim/ros_gz/blob/ros2/ros_gz_bridge/README.md
Megjegyzés WSL esetén
Gazebo szimulátort és Windows Subsystem for Linux-ot használva előfordulhat egy issue, ami egy egyszerű környezeti változó beállításával javítható. A ~/.bashrc fájlba a következőt kell beállítani:
export LIBGL_ALWAYS_SOFTWARE=1 ### GAZEBO IGNITION
Új terminál vagy source után a echo $LIBGL_ALWAYS_SOFTWARE parancsra 1-et fog kiíni.
Példa: Gazebo Fortress beépített világok (world)
WSL elsetén első lépésként ellenőrizzük a beállítások helyességét:
echo $LIBGL_ALWAYS_SOFTWARE
Amennyiben a parancsra 1-et ír válaszként, akkor helyes a beállításunk.
Nézzük meg a telepített verziót:
ign param --versions
A válasz pl 11.4.1 lehet.
Indítsuk el a Gazebo-t:
ign gazebo
Nyissuk meg a shapes.sdf világot. Az SDF (Simulation Description Format), egy beépített XML leírás. AKár egy parancsként is indítható: ign gazebo shapes.sdf.
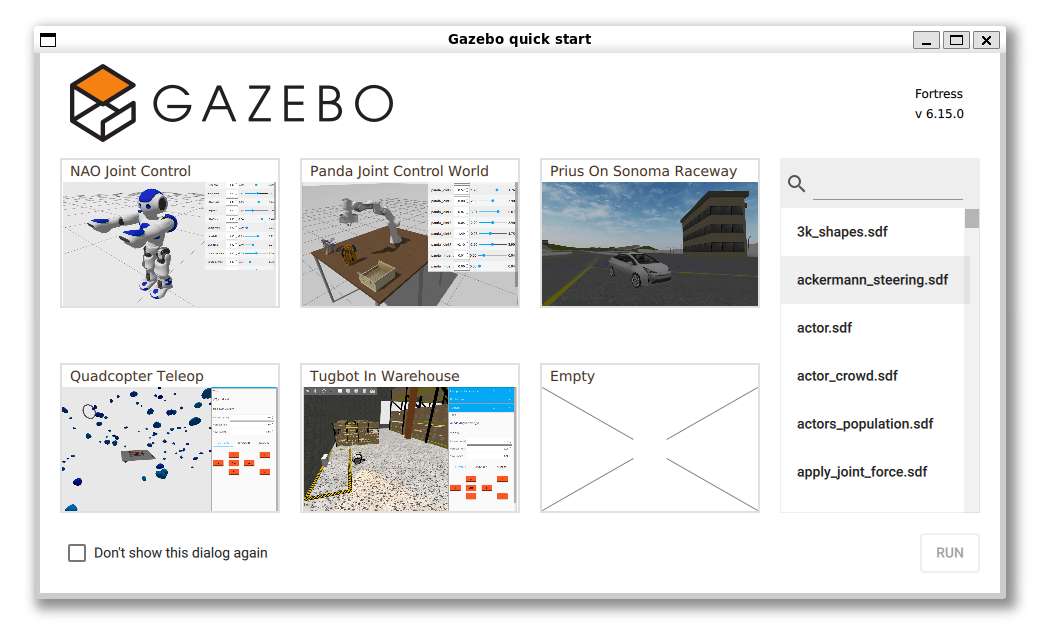
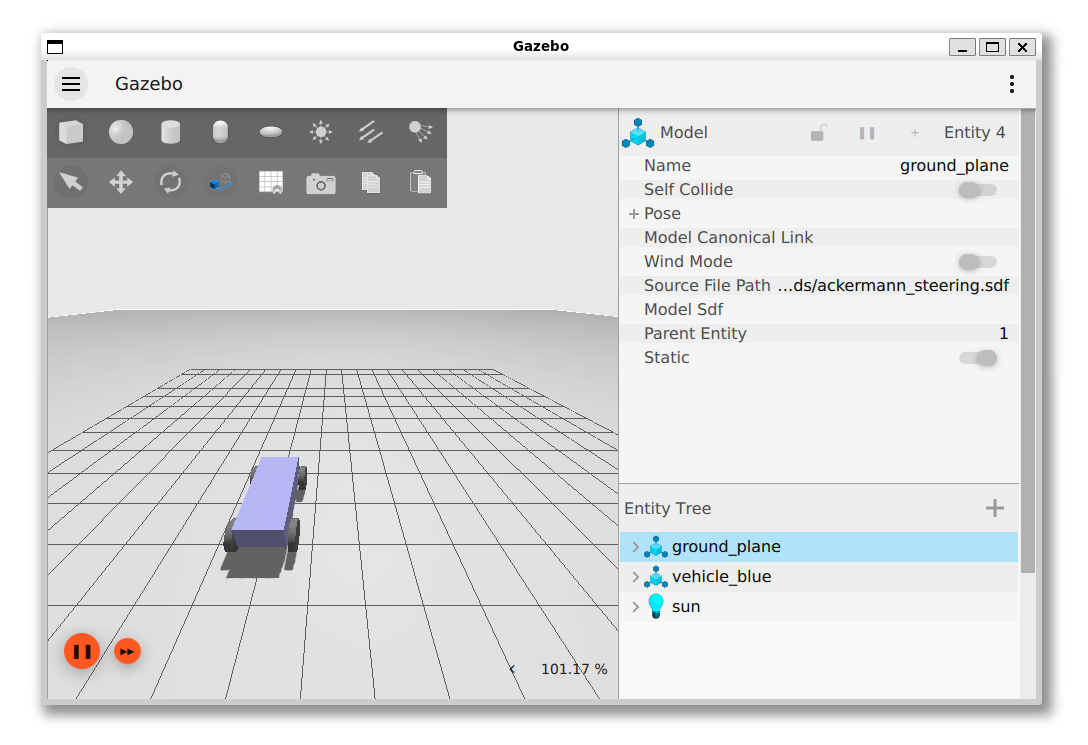
Példa: Ackermann robot
Ackermann robotnak a “személyautó-szerű” elől két kormányzott, hátul pedig két nem kormányzott kerékkel rendelkező járművet / robotot. Ebben a példában egy ilyen robotot szeretnénk mozgatni ROS 2-ből. Az ign gazebo parancsra a szimuláció-választó felület indul. Egy paranccsal indítható az Ackermann robot szimuláció:
ign gazebo -v 4 -r ackermann_steering.sdf
Az Ignition Gazebo ROS 2-től független, de jól támogatott, így ros_gz_bridge package segítségével indítható az a bridge, amin a szimmulációs topicok ROS 2 topicként látszanak, pl:
sudo apt update
sudo apt install ros-humble-ros-gz -y
Tanteremben pedig:
cd /mnt/kozos/script
./gz_bridge.sh
ros2 run ros_gz_bridge parameter_bridge /model/vehicle_blue/cmd_vel@geometry_msgs/msg/Twist]ignition.msgs.Twist
ros2 run ros_gz_bridge parameter_bridge /model/vehicle_blue/odometry@nav_msgs/msg/Odometry[ignition.msgs.Odometry --ros-args -r /model/vehicle_blue/odometry:=/odom
ros2 run ros_gz_bridge parameter_bridge /world/ackermann_steering/pose/info@tf2_msgs/msg/TFMessage[ignition.msgs.Pose_V --ros-args -r /world/ackermann_steering/pose/info:=/tf
Ez a 3 parancs egy hosszú parancsként is kiadható:
ros2 run ros_gz_bridge parameter_bridge /model/vehicle_blue/cmd_vel@geometry_msgs/msg/Twist]ignition.msgs.Twist /model/vehicle_blue/odometry@nav_msgs/msg/Odometry[ignition.msgs.Odometry /world/ackermann_steering/pose/info@tf2_msgs/msg/TFMessage[ignition.msgs.Pose_V --ros-args -r /world/ackermann_steering/pose/info:=/tf -r /model/vehicle_blue/odometry:=/odom
Hogy pontosan milyen szimulációs topicok vannak, az ezekkel a parancsokkal ellenőrizhatő:
ign topic -l
ign topic -et /model/vehicle_blue/tf
ign topic -i --topic /model/vehicle_blue/tf
Billentyűzetről teleoperálhatjuk a járművet:
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r /cmd_vel:=/model/vehicle_blue/cmd_vel