Small Assignment¶
The purpose of the small assignment is for students to gain practical experience with ROS 2 and GitHub alongside the basic theoretical knowledge acquired in class. The small assignment can be completed in a relatively short time: an instructor can finish it in a few hours, and an average student can complete it in a few afternoons. It is important to note that the assignment is a requirement for the signature.
Expected qualities:
- One package, 1 or 2 nodes
- At least 1 publisher or 1 subscriber (more is allowed)
- Short documentation that includes the build process and node-topic relationships, with the level of detail as shown in the examples
- Correct naming
- Use of a template recommended method for creating the small assignment repo or your own solution, but with the level of detail as shown in the examples
- Preferably compiles without errors, but
build warningsare often acceptable, the main point is learning - As many commits as possible to show the workflow
- Short length: 30-100 lines of code per node + CMakeLists.txt, package.xml, README.md, launch files (longer is acceptable but not required)
- Preferably illustrated with images (see examples)
- Preferably a mermaid diagram showing the relationships between nodes and topics (see examples, description)
Danger
The small assignment will be acceptable if the node can be built and produces the output as specified in the task! If this is not met, the student will have one week to correct it from the time the issue is posted!
Examples¶
Example of a small assignment created by the instructors:
- github.com/szepilot/sze_sw1_szinusz: The package consists of two nodes. The
/gen_nodegenerates sine waves and random numbers, which are advertised in twostd_msgs/float32topics. The/sum_nodesums the generated topics and advertises them in a newstd_msgs/float32topic. Implemented underROS 2 Humble. - github.com/horverno/hor_d20_batman_turtle: The package consists of one node, which can draw a "Batman logo" in the turtlesim simulator by plotting the trajectory. The advertised topic is of type
geometry_msgs/twist. Implemented underROS 2 Humble. - The package consists of one node. This
/array_sorternode subscribes to astd_msgs/msg/float32_multi_arraytype topic, then advertises the sorted version of the same type in ascending order. Implemented underROS 2 Humble. - The package consists of two nodes. The
/sensor_nodegenerates simulated sensor data: temperature and humidity, which are advertised in two separatesensor_msgs/Temperatureandsensor_msgs/RelativeHumiditytype topics. The/monitor_nodemonitors these data, and if the temperature exceeds a certain threshold or the humidity exceeds another, it sends an alert in astd_msgs/Stringtype topic. Implemented underROS 2 Humble. - The package consists of one node. The
/minecraft_nodeadvertises avisualization_msgs/Markertype topic. By subscribing to the topic, a Minecraft character can be displayed in RViz2. Implemented underROS 2 Humble. - github.com/umiklos/ung_isl_ajr_point_and_orientation: The package consists of two nodes. One node generates a
geometry_msgs/Pointtype, and the other node advertises ageometry_msgs/Posetype by adding orientation to it. Implemented underROS 2 Humble. - github.com/umiklos/ung_isl_ajr_data_generation_and_control: The package consists of two nodes. The
/sensor_data_generatorgenerates simulated data with a fictitious sensor, such as distance and speed, which are advertised in two separatesensor_msgs/Rangeandgeometry_msgs/Twisttype topics. The other node, the/control_node, monitors these data and makes control decisions for the robot, which are printed in the terminal. Implemented underROS 2 Humble. - The package consists of two nodes. The
/imu_data_publisherprovides accelerometer and gyroscope sensor data, which are advertised in asensor_msgs/Imutype topic. The other node, the/imu_data_analyzer, analyzes these IMU data and generates reports on the robot's status in adiagnostic_msgs/DiagnosticArraytype topic. Implemented underROS 2 Humble.
It is advisable, but not mandatory, to choose from diagnostic_msgs, geometry_msgs, nav_msgs, sensor_msgs, shape_msgs, std_msgs, trajectory_msgs, visualization_msgs.
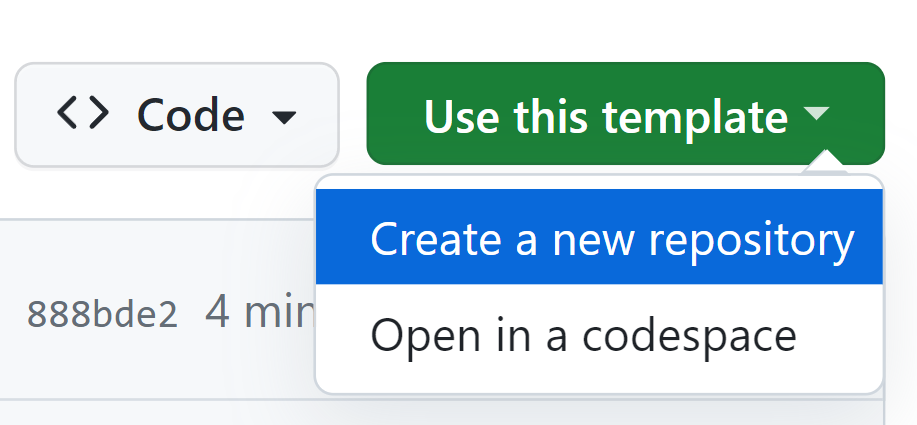
Recommended Method for Creating the Small Assignment Repo: Template¶
We have created a so-called template repo in both C++ and Python, which makes it easier to create the first repository containing a package:
Tip
You can read about it here.
Repo Name¶
- The repository name should follow this pattern:
VVV_NNN_optional, where VVVis the first 3 characters of the last nameNNNis the first 3 characters of the Neptun codeoptionalis an optional addition- The above should be separated by an underscore
_and all lowercase - For example: István Szabó, with Neptun code F99AXW, could have a URL for a small assignment dealing with random numbers like:
github.com/szaboistvan/sza_f99_random.