Gyakorlat¶
A gyakorlaton a robotverseny szimulációt fogjuk használni. A szimulátor linkenlt leírás alapján telepíthető.
Melodic
Noetic
Sebességszabályzó PID hangolása¶
A következő paranccsal egy üres (akadályok nélküli) szimuláció indul. Ez a PID sebességszabályzó hangolására alkalmas.
roslaunch racecar_gazebo racecar_empty.launch
roslaunch racecar_control cmd_vel_from_file.launch
Szükségünk lesz referencia jelek kiadására, megismételhető módon. Ezt a példában egy csv beolvasása, majd /cmd_vel topicon hirdetése jelenti. Vizsgáljuk meg a python fájlt. A topic hirdetése, a node ROS-ben történő regisztrálása, a csv fájl beolvasása a fájl elején található:
cmd_pub = rospy.Publisher('/cmd_vel', Twist, queue_size=1)
rospy.init_node('cmd_vel_from_file', anonymous=True)
rate = rospy.Rate(10) # 10hz
msg_twist = Twist()
csv_file = rospy.get_param('~csv')
rospack = rospkg.RosPack()
path = rospack.get_path('racecar_control')
rospy.loginfo('csv file is: %s/config/%s' % (path, csv_file))
array = pd.read_csv(path + '/config/' + csv_file, header = None).to_numpy()
start_time = rospy.Time.now()
A folyamatosan futó loop /cmd_vel.linear.x jeleket hirdet, a csv-ben található idő szerint. A np.where visszaadja, hogy az aktuális idő szerint (current_time) milyen sebesség indexnél (itemindex) tartunk. Ez egy 2D array, ami minden, a feltételnek megfelelő indexet tartalmaz, de számunkra persze csak ennek az első eleme a fontos, ezt fogjuk hirdetni.
while not rospy.is_shutdown():
current_time = (rospy.Time.now() - start_time).to_sec()
itemindex = np.where(array[:,0] >= current_time)
try:
msg_twist.linear.x = array[itemindex[0][0],1]
except:
msg_twist.linear.x = 0.0
cmd_pub.publish(msg_twist)
rate.sleep()
A roscd parancs segítségével lépjünk a racecar_control package config mappájába.
roscd racecar_control/config/
Ez valószínűleg a ~/sim_ws/src/racecar_gazebo/f1tenth/virtual/dependencies/racecar_control/config helyen található, de elképzelhtő, hogy valaki máshova telepítette.
Innen betölthetünk különböző PID beállításokat, pl:
rosparam load racecar_control01.yaml
rosparam load racecar_control02.yaml
rosparam load racecar_control03.yaml
Ellenőrizzük a get paranccsal, a következőhöz hasnonló eredményt fogunk kapni:
rosparam get /racecar/left_rear_wheel_velocity_controller/pid/
{antiwindup: false, d: 0.0, i: 0.0, i_clamp: 0.0, i_clamp_max: 0.0, i_clamp_min: -0.0,
p: 5.0}
Note
Alternatívaként használhatjuk a rosrun rqt_reconfigure rqt_reconfigure parancsot is.
Futtassuk a következő parancsot a sebesség referencia kiadására:
roslaunch racecar_control cmd_vel_from_file.launch
01.csv, 02.csv stb fájlt töltse-e be. Többször futtathatjuk, akár más PID beállítások mellett is.
Figyeljünk meg két topicot pl Foxglove segítségével, különböző PID beállítások mellett:
- /racecar/left_rear_wheel_velocity_controller/state.process_value
- /racecar/left_rear_wheel_velocity_controller/command.data

Kormányzás PID hangolása¶
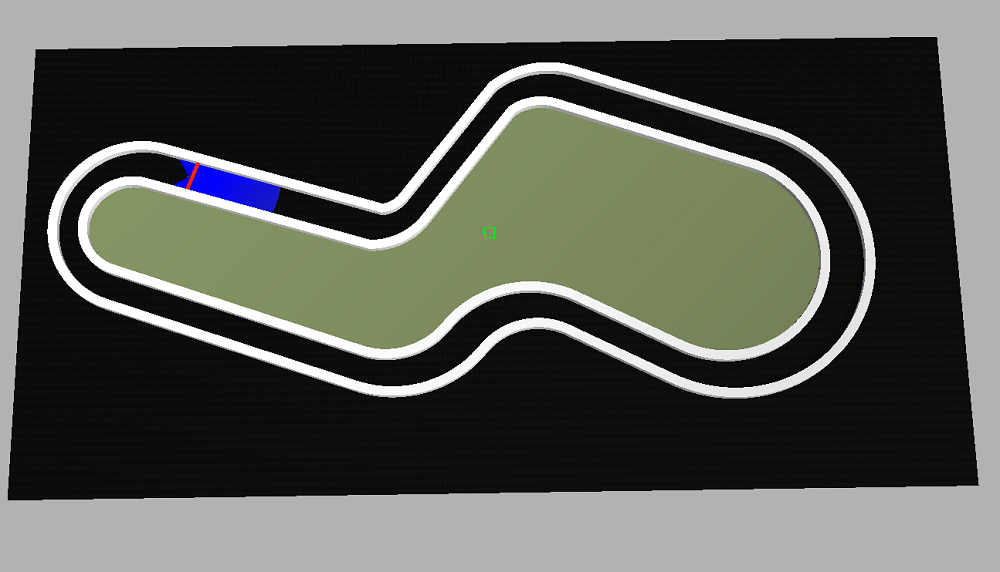
A következő parancsra, már nem üres, hanem egy körbekerített versenypálya nyílik meg.
roslaunch racecar_gazebo racecar.launch
A pálya a következőképp néz ki: