Practice¶
The practice works with Ubuntu 22.04 ROS humble, Windows 10/11 WSL humble. The description of the installation of different versions can be found here.
Preliminary Check
It is worth checking on your home computer before the practice to ensure that the appropriate ROS 2 software packages are installed.
sudo apt install ros-humble-rosbag2 ros-humble-rosbag2-storage-mcap
check_all.sh:
cd /mnt/kozos/script
./bag_mcap.sh
./check_all.sh
Preparations¶
In the previous practice, we got acquainted with the following rosbag (in ROS 2, the format is already .mcap):
As a preparation, let's check if the C:\temp directory exists
test -d "/mnt/c/temp" && echo Letezik || echo Nem letezik
ls /mnt/c/temp
- If it does not exist (No such file or directory), create it:
mkdir /mnt/c/temp - If it exists, there is nothing to do, proceed to the next step, and copy the
.mcapfiles here In the classroom, the copying should be done with one of the following commands:At home, you can download from the following link (green button) or as a command withrsync -avzh --progress /mnt/kozos/measurement_files/lexus3sample01.mcap /mnt/c/temp/ rsync -avzh --progress /mnt/kozos/measurement_files/lexus3sample02.mcap /mnt/c/temp/ rsync -avzh --progress /mnt/kozos/measurement_files/lexus3sample03.mcap /mnt/c/temp/ rsync -avzh --progress /mnt/kozos/measurement_files/lexus3sample04.mcap /mnt/c/temp/ rsync -avzh --progress /mnt/kozos/measurement_files/lexus3sample05.mcap /mnt/c/temp/wget:wget -O lexus3sample02.mcap https://laesze-my.sharepoint.com/:u:/g/personal/herno_o365_sze_hu/EakTOhcjblNInqjRMfaGVmsB0diDv0SWpXw9rwo0MD7f3w?download=1
List the appropriate copied .mcap file's basic information, similarly:
ros2 bag info /mnt/c/temp/lexus3sample06.mcap
closing.
Files: /mnt/c/temp/lexus3sample06.mcap
Bag size: 286.7 MiB
Storage id: mcap
Duration: 3.367s
Start: Jul 18 2023 15:37:09.211 (1689687429.211)
End: Jul 18 2023 15:38:03.314 (1689687483.314)
Messages: 29598
Topic information:
Topic: /lexus3/zed2i/zed_node/right_raw/image_raw_color/compressed | Type: sensor_msgs/msg/CompressedImage
Topic: /lexus3/os_left/points | Type: sensor_msgs/msg/PointCloud2
Topic: /lexus3/os_right/points | Type: sensor_msgs/msg/PointCloud2
Topic: /lexus3/os_center/imu | Type: sensor_msgs/msg/Imu
Topic: /tf_static | Type: tf2_msgs/msg/TFMessage
Topic: /lexus3/os_center/points | Type: sensor_msgs/msg/PointCloud2
Topic: /tf | Type: tf2_msgs/msg/TFMessage
Topic: /lexus3/gps/duro/mag | Type: sensor_msgs/msg/MagneticField
Topic: /lexus3/gps/duro/imu | Type: sensor_msgs/msg/Imu
Topic: /lexus3/gps/duro/status_string | Type: std_msgs/msg/String
Topic: /lexus3/gps/duro/current_pose | Type: geometry_msgs/msg/PoseStamped
Play back the .mcap file¶
Next, we will play back the measurement data file and check what data appears, in what type, and at what speed. The --loop switch is for infinite repetition, and the --clock switch is for advertising a /clock topic, which adjusts the playback.
ros2 bag play /mnt/c/temp/lexus3sample06.mcap --clock --loop
ros2 bag play /mnt/c/temp/lexus3sample06.mcap --clock --loop --rate 0.2
ros2 topic list
/clock
/events/read_split
/lexus3/gps/duro/current_pose
/lexus3/gps/duro/imu
/lexus3/gps/duro/mag
/lexus3/gps/duro/status_string
/lexus3/os_center/imu
/lexus3/os_center/points
/lexus3/os_left/points
/lexus3/os_right/points
/lexus3/zed2i/zed_node/right_raw/image_raw_color
/parameter_events
/rosout
/tf
/tf_static
The ros2 topic hz shows the frequency of the given topic. The position in this case is ~20Hz.
ros2 topic hz /lexus3/gps/duro/current_pose
average rate: 20.133
min: 0.002s max: 0.101s std dev: 0.03451s window: 22
ROS 2 Time Management¶
ROS uses Unix time, or POSIX time, for time management. This represents the number of seconds and nanoseconds that have elapsed since January 1, 1970, 00:00:00 UTC (Greenwich Mean Time) (int32 sec, int32 nsec). This format takes up relatively little memory and allows for easy calculation of the elapsed time between two points by simple subtraction.
The disadvantage is that it is not very intuitive and not human-readable. For example, Foxglove Studio often converts it to a more readable format for this reason.


Seconds and nanoseconds can be imagined as follows:
import rclpy
current_time = node.get_clock().now()
print(current_time.to_msg())
Output:
sec=1694595162, nanosec=945886859
ros2 topic echo /clock --once
clock:
sec: 1689687476
nanosec: 770421827
ros2 topic echo --once /lexus3/gps/duro/current_pose
header:
stamp:
sec: 1694595162
nanosec: 945886859
frame_id: map
pose:
position:
x: 640142.9676535318
y: 5193606.439717201
z: 1.7999999523162842
orientation:
x: 0.008532664424537166
y: 0.0018914791588597107
z: 0.44068499630505714
w: 0.8976192678279703
from datetime import datetime
current_time_float = current_time.to_msg().sec + current_time.to_msg().nanosec / 1e9 # 1e9 is 1,000,000,000: nanosec to sec
print("As a float:\t%.5f" % (current_time_float))
print("ISO format:", end="\t")
print(datetime.utcfromtimestamp(current_time_float).isoformat())
Output:
As a float: 1694595162.94589
ISO format: 2023-09-13T08:52:42.945887
Reminder: A nanosecond is one billionth of a second (10^-9 s).
Global Navigation Satellite System (GNSS) / Global Positioning System (GPS)¶
Global Navigation Satellite System (GNSS) / Global Positioning System (GPS) github.com/szenergy/duro_gps_driver When the GPS is connected to the computer via Ethernet and the ROS driver is started, it will advertise the following topics:
| Topic | Type |
|---|---|
/gps/duro/current_pose |
[geometry_msgs/PoseStamped] |
/gps/duro/fix |
[sensor_msgs/NavSatFix] |
/gps/duro/imu |
[sensor_msgs/Imu] |
/gps/duro/mag |
[sensor_msgs/MagneticField] |
/gps/duro/odom |
[nav_msgs/Odometry] |
/gps/duro/rollpitchyaw |
[geometry_msgs/Vector3] |
/gps/duro/status_flag |
[std_msgs/UInt8] |
/gps/duro/status_string |
[std_msgs/String] |
/gps/duro/time_ref |
[sensor_msgs/TimeReference] |
Inertial Measurement Unit (IMU)¶
Typical ROS 2 topic types:
sensor_msgs/msg/Imu, sensor_msgs/msg/MagneticField
ros2 topic echo --once /lexus3/gps/duro/imu
header:
stamp:
sec: 1695039048
nanosec: 44466475
frame_id: duro
orientation:
x: 0.0
y: 0.0
z: 0.7071067811865475
w: 0.7071067811865476
orientation_covariance:
- [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.01330030487804878
y: 0.015893864329268294
z: 0.037307355182926834
angular_velocity_covariance:
- [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: -0.5291185668945312
y: 0.031124621582031248
z: -9.610325463867188
linear_acceleration_covariance:
- [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
Camera¶
Typical ROS 2 topic types:
sensor_msgs/msg/Image, sensor_msgs/msg/CameraInfo
ros2 topic echo --once /lexus3/zed2i/zed_node/right_raw/image_raw_color
header:
stamp:
sec: 1695039047
nanosec: 340698516
frame_id: zed2i_right_camera_optical_frame
height: 720
width: 1280
encoding: bgra8
is_bigendian: 0
step: 5120
data: 21,66,93,255,21,66,94,255,25,69,94,255,14,63,90,255,31,55,80,255,19,49,75,255,26,55,76,255,24,57,80,255,35,51,72,255,30,52,74,255,57,73,88,255,55,74,90,255,64,74,93,255,52,66,86,255,56,61,76,255,25,34,48,255,25,31,52,255,16,24,43,255,14,22,41,255,19,27,46,255,13,20,38,255,23,28,45,255,31,41,65,255,36,37,59,255,23,59,82,255,45,71,91,255,51,84,116,255,70,94,122,255,57,105,141,255,42,84,117,255,42,90,126,255,36,81,116,255,..
Lidar¶
Typical ROS 2 topic types:
sensor_msgs/msg/PointCloud2, sensor_msgs/msg/LaserScan
ros2 topic echo --once /lexus3/os_center/points
header:
stamp:
sec: 1695039048
nanosec: 390894137
frame_id: lexus3/os_center_a_laser_data_frame
height: 64
width: 1024
fields:
- name: x, y, z, intensity, t, reflectivity, ring, ambient, range
data: 0,0,0,0,0,0,0,0,0,0,0,0,0,0,128,63,0,0,16,65,96,211,241,2,0,0,0,0,12,3,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,128,63,0,0,16,65,116,145,242,2,0,0,0,0,0,3,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,128,63,0,0,32,65,18,92,243,2,0,0,0,0,253,2,0,0,...,
Visualization¶
RVIZ2¶
ros2 run rviz2 rviz2
Set up a similar layout:

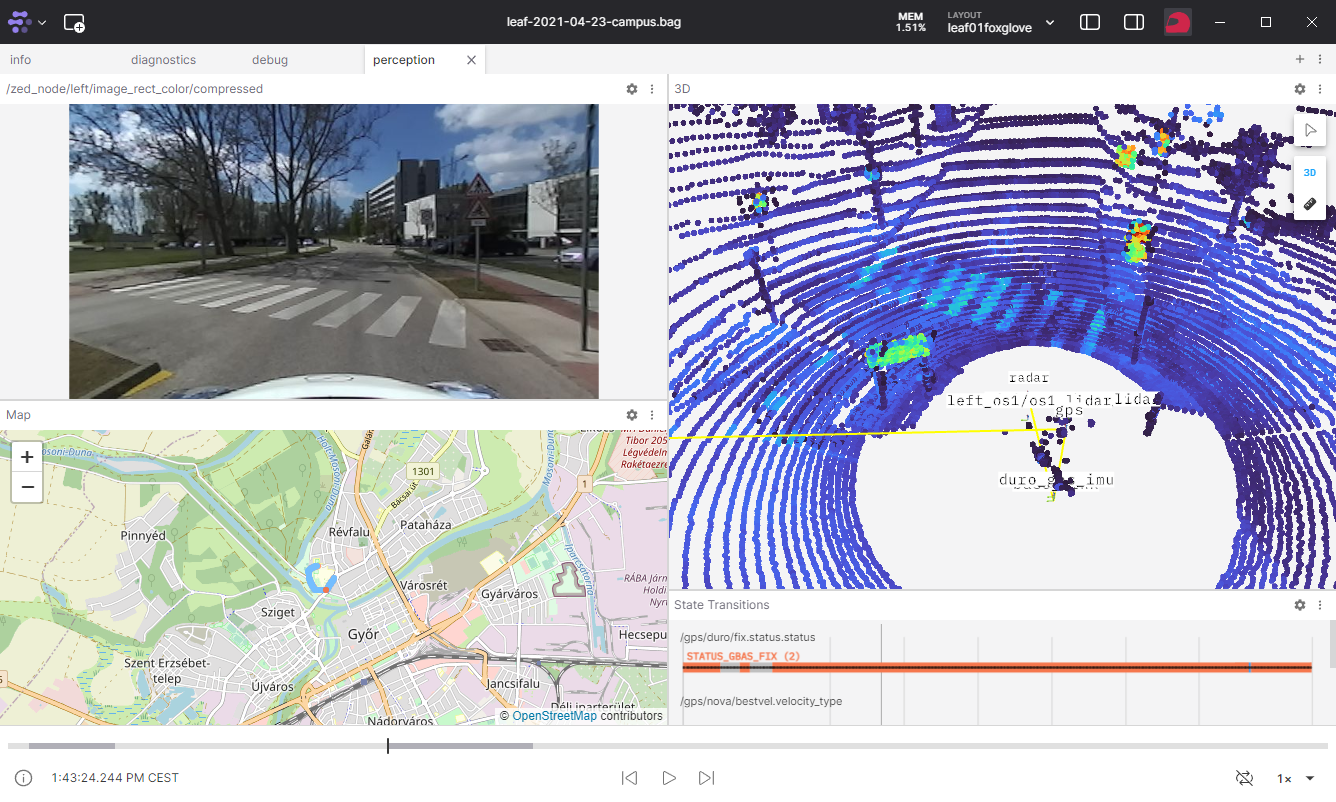
Foxglove studio¶
ros2 launch foxglove_bridge foxglove_bridge_launch.xml port:=8765
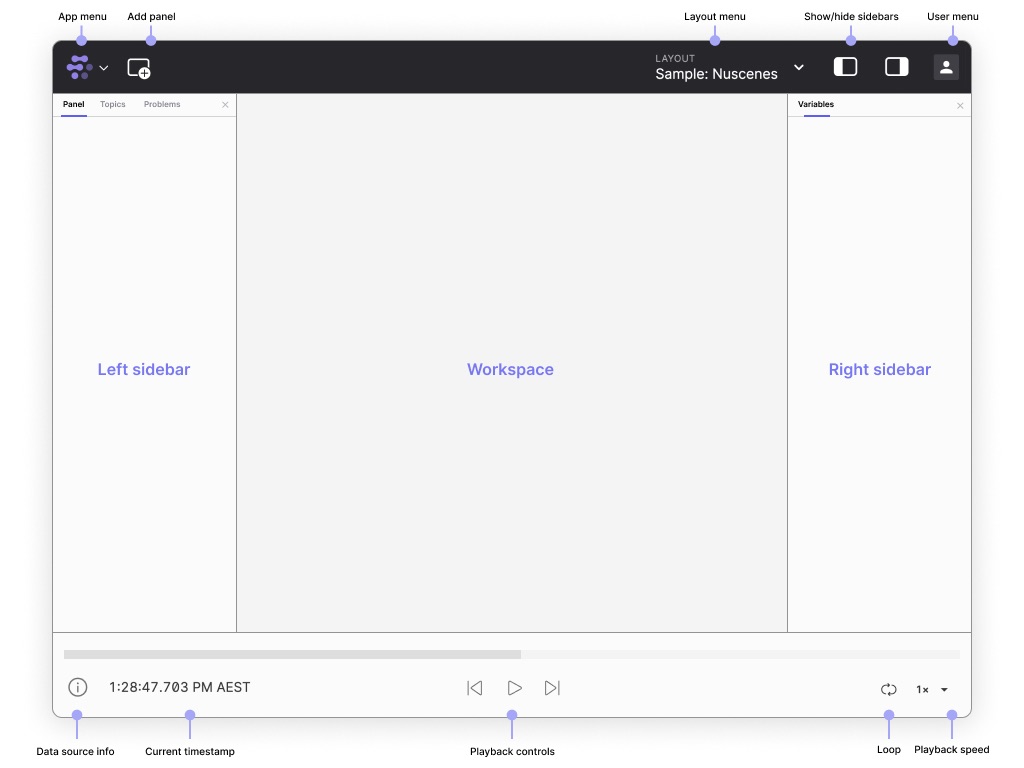
Set up a similar layout:

Source: foxglove.dev/blog/introducing-foxglove-studios-new-navigation
Create the simple_sub_cpp package¶
Next, we will create a simple subscriber node that subscribes to geometry_msgs/PoseStampedmessages and prints the X and Y coordinates. The practice is based on the official ROS 2 tutorials
Open a new terminal and source the installation so that the ros2 commands work.
Navigate to the already created ros2_ws directory.
It is important to create the packages in the src directory, not in the root of the workspace. So navigate to the ros2_ws/src folder and run the package creation command:
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake simple_sub_cpp
The terminal will return a message confirming the creation of the simple_sub_cpp package and all necessary files and folders.
Write the subscriber node (print_pose.cpp >> simple_sub_node)¶
Navigate to the ros2_ws/src/simple_sub_cpp/src folder.
cd ~/ros2_ws/src/simple_sub_cpp/src
.cpp extension).
Download the example subscriber code:
wget -O print_pose.cpp https://raw.githubusercontent.com/sze-info/arj_packages/main/etc/print_pose.cpp
This command created the print_pose.cpp file.
Navigate back one level to the cd ~/ros2_ws/src/simple_sub_cpp directory, where the CMakeLists.txt and package.xml files have already been created. Open the folder with VS Code, for example, using the code . command. Here, the . after code means the current folder. Tip: even if you are not in the directory, it is possible to open the entire directory, which simplifies some things later:
code ~/ros2_ws/src/simple_sub_cpp/

// ros2 topic type /lexus3/gps/duro/current_pose
// geometry_msgs/msg/PoseStamped
// ros2 interface show geometry_msgs/msg/PoseStamped
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/pose_stamped.hpp"
using std::placeholders::_1;
class SimplePoseSub : public rclcpp::Node
{
public:
SimplePoseSub() : Node("simple_pose_sub")
{
sub1_ = this->create_subscription<geometry_msgs::msg::PoseStamped>("/lexus3/gps/duro/current_pose", 10, std::bind(&SimplePoseSub::topic_callback, this, _1));
}
private:
void topic_callback(const geometry_msgs::msg::PoseStamped &msg) const
{
RCLCPP_INFO(this->get_logger(), "x: %.3f, y: %.3f", msg.pose.position.x, msg.pose.position.y);
}
rclcpp::Subscription<geometry_msgs::msg::PoseStamped>::SharedPtr sub1_;
};
int main(int argc, char *argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<SimplePoseSub>());
rclcpp::shutdown();
return 0;
}
!!! important "Python equivalent" The C++ code also has a Python version available at github.com/sze-info/arj_packages címen. Érdemes összehasonlítani a C++ és a python kódokat. It is worth comparing the C++ and Python codes.
Adding Dependencies¶
It is always advisable to fill in the <description>, <maintainer>, and <license>tags:
<description>Examples of minimal publisher/subscriber using rclcpp</description>
<maintainer email="you@email.com">Your Name</maintainer>
<license>Apache License 2.0</license>
Add a new line after the ament_cmake build tool dependency and insert the following dependencies according to the node's include statements:
<depend>rclcpp</depend>
<depend>geometry_msgs</depend>
This declares that the package requires rclcpp and geometry_msgs at build and runtime.
CMakeLists.¶
Now open the CMakeLists.txt file. Add the following lines under the existing find_package(ament_cmake REQUIRED)dependency:
find_package(rclcpp REQUIRED)
find_package(geometry_msgs REQUIRED)
print_pose.cpp for now) and name it simple_sub_node so that it can be run using ros2 run:
add_executable(simple_sub_node src/print_pose.cpp)
ament_target_dependencies(simple_sub_node rclcpp geometry_msgs)
Finally, add the install(TARGETS...) section so that ros2 can find the executable we compiled:
install(TARGETS
simple_sub_node
DESTINATION lib/${PROJECT_NAME})
The CMakeLists.txt can be cleaned up by removing some unnecessary sections and comments, resulting in the following:
cmake_minimum_required(VERSION 3.8)
project(simple_sub_cpp)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(geometry_msgs REQUIRED)
add_executable(simple_sub_node src/print_pose.cpp)
ament_target_dependencies(simple_sub_node rclcpp geometry_msgs)
install(TARGETS
simple_sub_node
DESTINATION lib/${PROJECT_NAME})
ament_package()
In summary, we made the following changes:


Build and Run¶
!!! success The package can now be built:
cd ~/ros2_ws/
colcon build --packages-select simple_sub_cpp
Run it as usual:
source ~/ros2_ws/install/setup.bash
ros2 run simple_sub_cpp simple_sub_node
Outputs:
[simple_pose_sub]: x: 697201.725, y: 5285679.845
[simple_pose_sub]: x: 697201.796, y: 5285679.548
[simple_pose_sub]: x: 697201.838, y: 5285679.251
[simple_pose_sub]: x: 697201.886, y: 5285678.949
Sources¶
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Creating-Your-First-ROS2-Package.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Cpp-Publisher-And-Subscriber.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Py-Publisher-And-Subscriber.html