1. Task¶
In this task, we will demonstrate the implementation of the polynomial-based local planner presented in the theoretical class. First, let's update the arj_packages repository!
Clone and Build¶
cd ~/ros2_ws/src/arj_packages/
git pull
cd ~/ros2_ws
colcon build --packages-select arj_local_planner
Execution¶
Next, let's run the planner using the launch file after sourcing.
source ~/ros2_ws/install/setup.bash
ros2 launch arj_local_planner run_all.launch.py
Check which topics have been created (in a new terminal)!
ros2 topic list
The /goal_pose topic and the /planner/trajectory topic have been created. The goal_pose is the target position for the planner, and the planner/trajectory is the waypoint list, the planned trajectory itself. Let's start an rviz!
ros2 run rviz2 rviz2
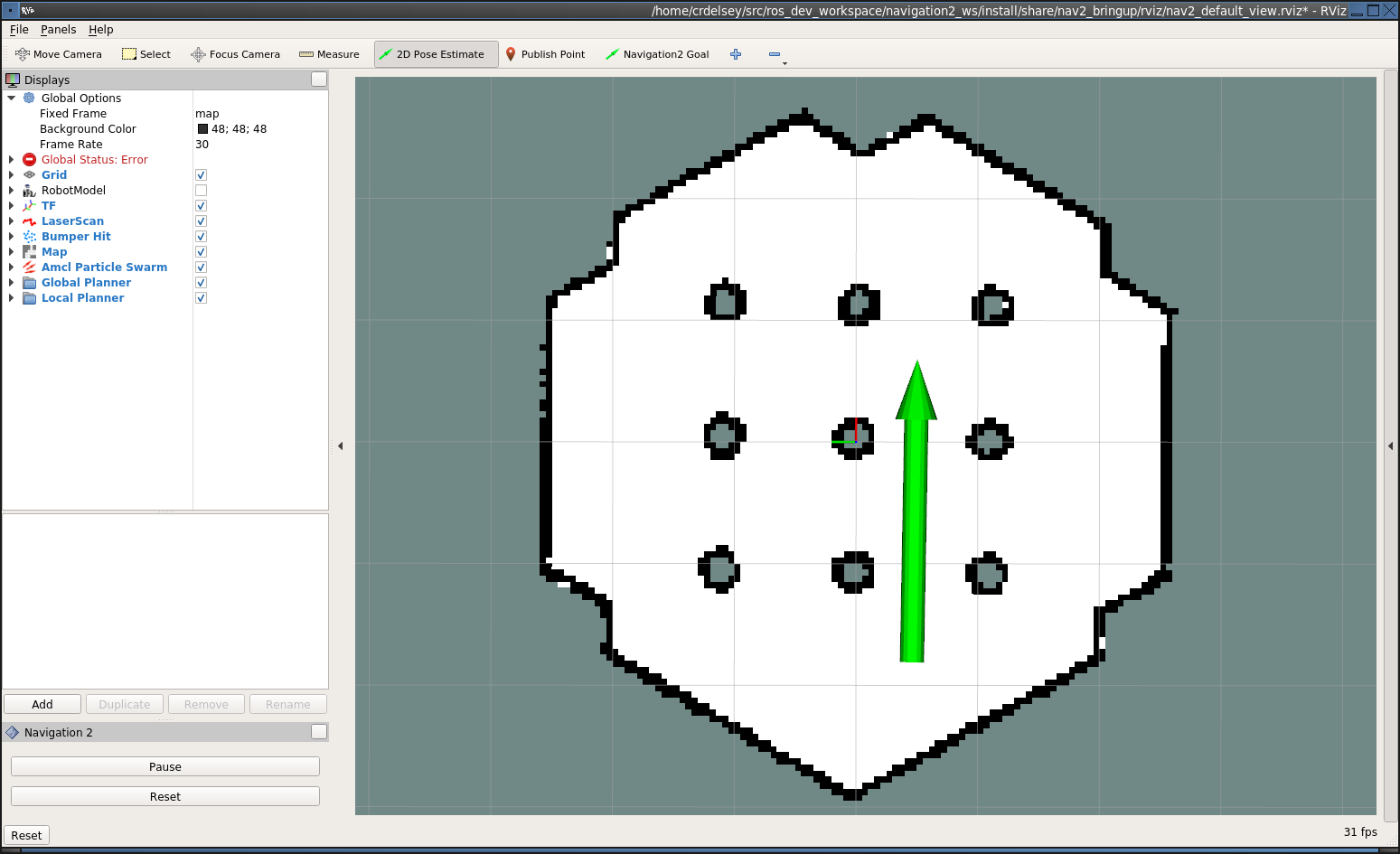
Select the map frame and add the /planner/trajectory topic. Then, using the 2D Goal Pose option from the top bar, set a goal pose on the grid in the positive coordinate direction! The planner will automatically fit a polynomial to the target position.

This simple planner can be used for moving targets (another vehicle, lane center, a point on the global trajectory, etc.) or static targets (e.g., parking spot).
2. Task¶
The second task is to set up the ROS 2 Navigation stack in a simulator on an empty track. Detailed documentation can be found on navigation.ros.org.
Clone and Build¶
cd ~/ros2_ws/src
git clone https://github.com/rosblox/nav2_outdoor_example
cd ~/ros2_ws
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
cd ~/ros2_ws
colcon build --packages-select nav2_outdoor_example
Execution¶
source ~/ros2_ws/install/setup.bash
ros2 launch nav2_outdoor_example bringup.launch.py
3. Task¶
The third task is to set up the ROS 2 Navigation stack in a simulator on one of the turtlebot tracks. Detailed documentation can be found on navigation.ros.org.
Clone and Build¶
sudo apt install ros-humble-navigation2 ros-humble-nav2-bringup ros-humble-turtlebot3-gazebo
cd ~/ros2_ws/src
git clone https://github.com/ros-controls/gz_ros2_control
git clone https://github.com/art-e-fact/navigation2_ignition_gazebo_example
cd ~/ros2_ws/src/gz_ros2_control
git checkout humble
cd ~/ros2_ws
rosdep install -y --from-paths src --ignore-src --rosdistro humble
cd ~/ros2_ws
colcon build --packages-select sam_bot_nav2_gz
Execution¶
Gazebo, RViz2, and Navigation2
source ~/ros2_ws/install/setup.bash
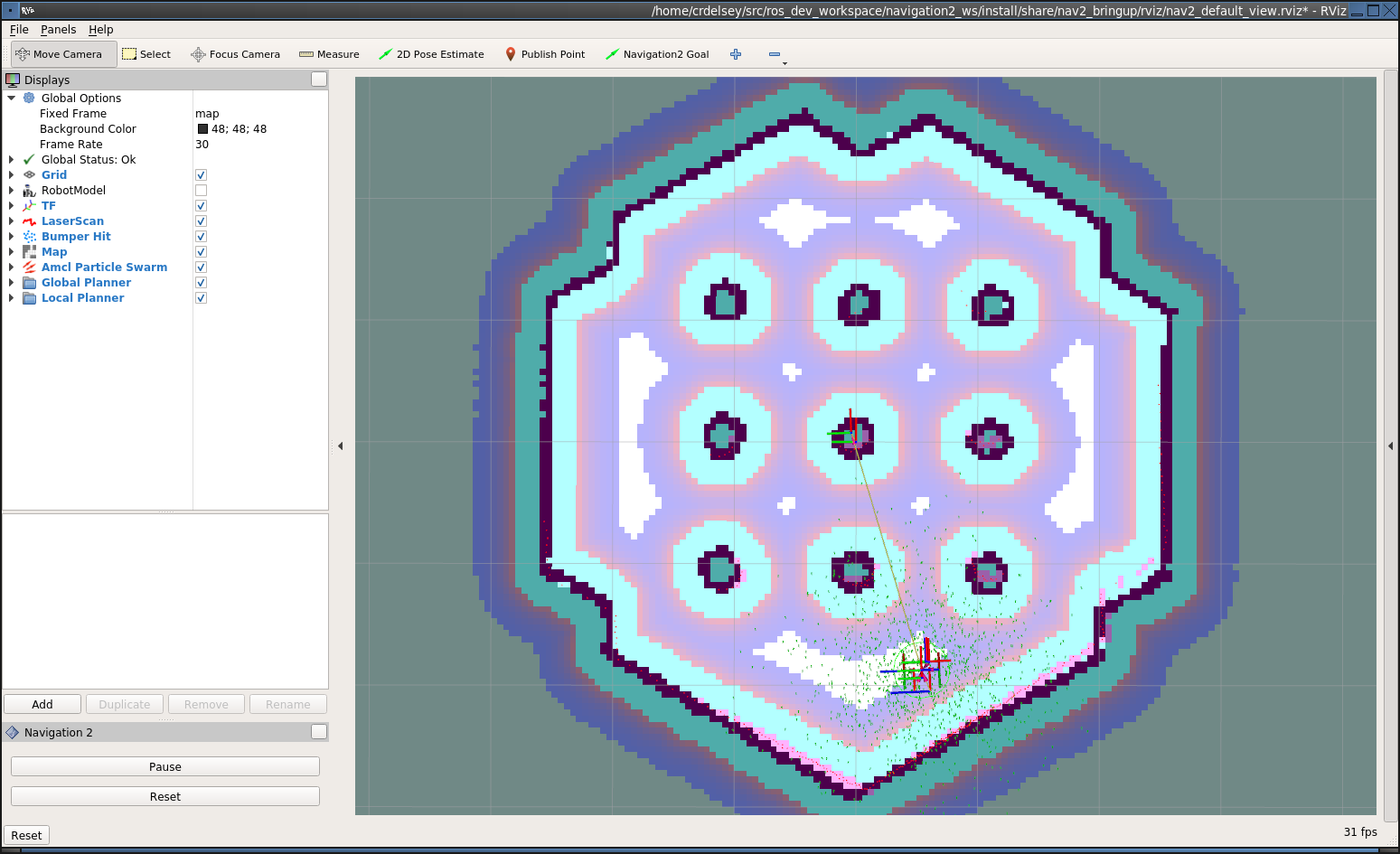
ros2 launch sam_bot_nav2_gz complete_navigation.launch.py
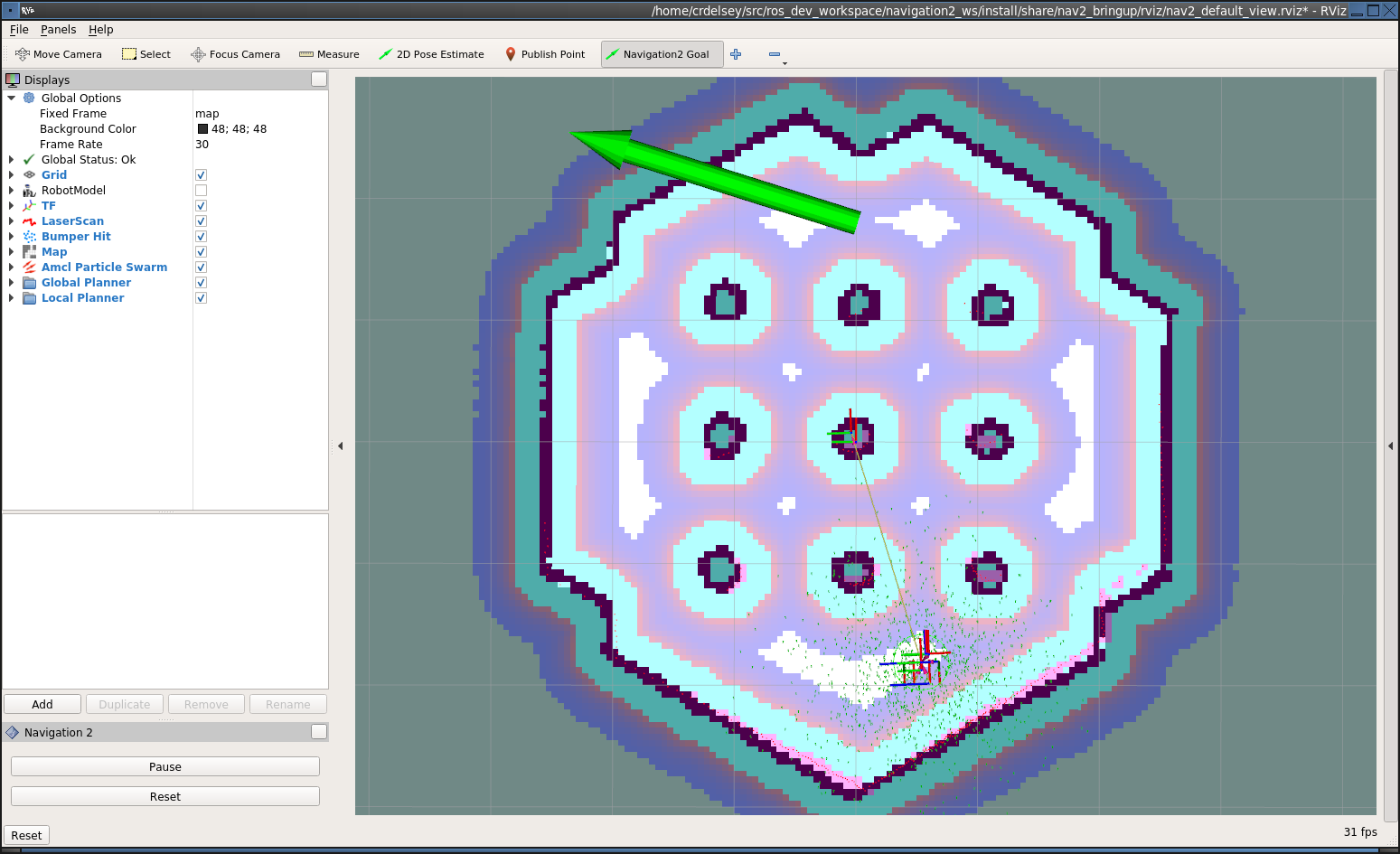
Setting a goal in RViz2:
source ~/ros2_ws/install/setup.bash
ros2 run sam_bot_nav2_gz follow_waypoints.py
source ~/ros2_ws/install/setup.bash
ros2 run sam_bot_nav2_gz reach_goal.py

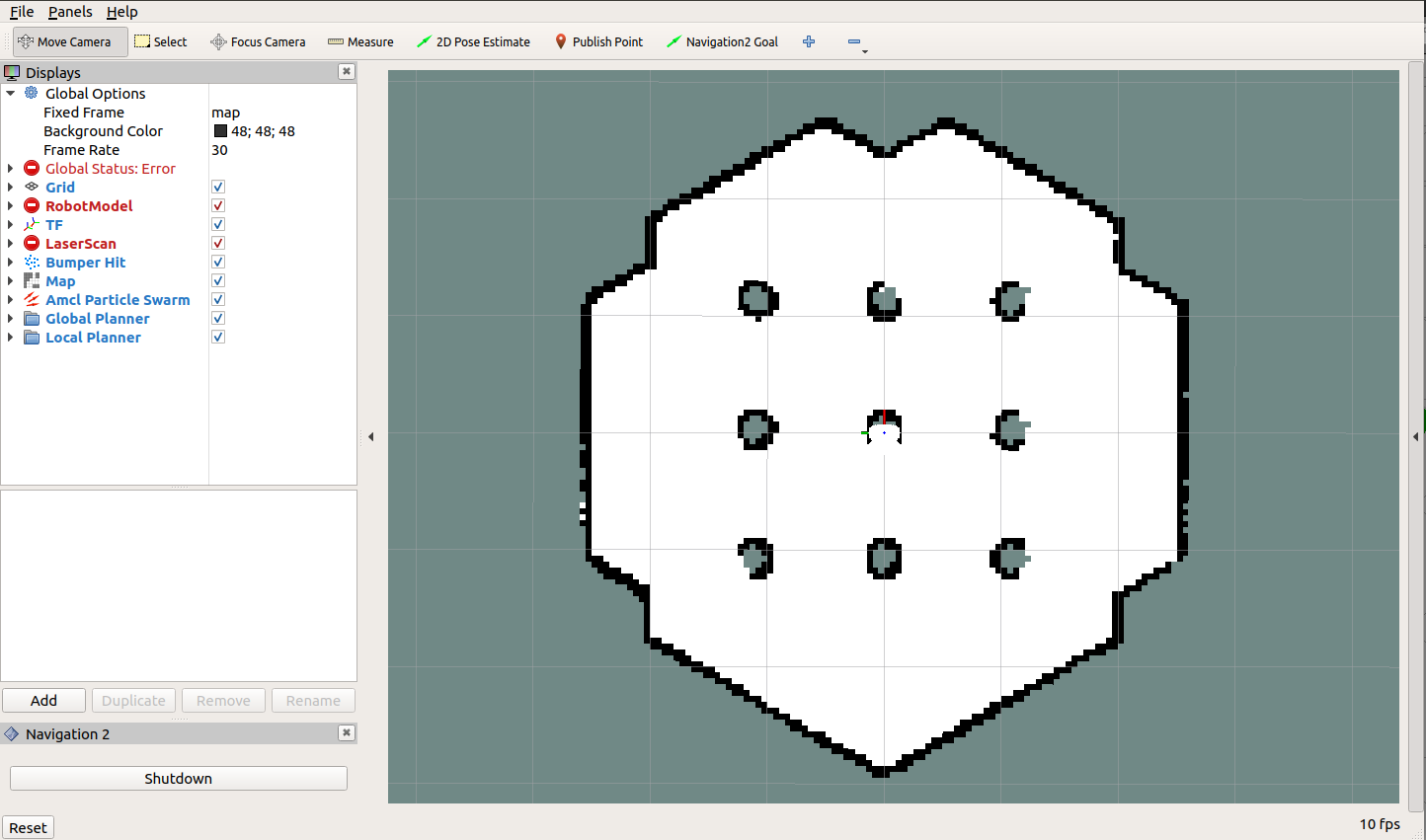
Navigation¶