SLAM and LOAM¶
Simultaneous localization and mapping (SLAM) and LIDAR-based odometry and mapping (LOAM).
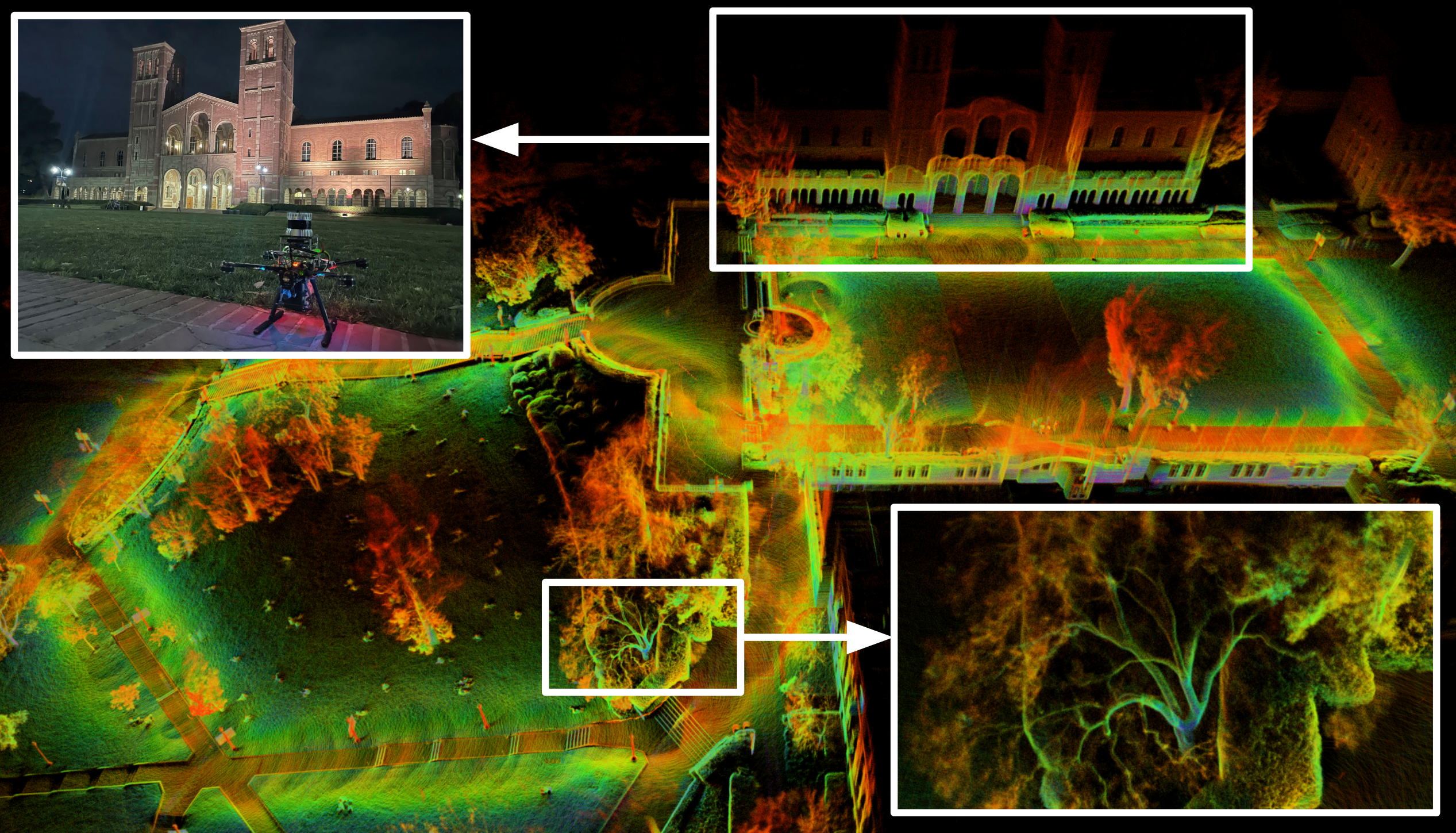
A global point cloud compiled from a measurement in Győr:

Direct LIDAR-Inertial Odometry¶
DLIO is a lightweight LIDAR-inertial odometry algorithm that generates a continuous trajectory using a novel coarse-to-fine approach.
Installation¶
Available:
- github.com/vectr-ucla/direct_lidar_inertial_odometry/tree/feature/ros2 ROS 2 branch
- github.com/jkk-research/direct_lidar_inertial_odometry fork containing only the ROS 2 branch
Let's check if pcl-ros
sudo apt install ros-humble-pcl-ros
cd ~/ros2_ws/src/
git clone https://github.com/jkk-research/direct_lidar_inertial_odometry
cd ~/ros2_ws/
colcon build --packages-select direct_lidar_inertial_odometry
Building the package¶
cd ~/ros2_ws/src/
git clone https://github.com/PRBonn/kiss-icp
cd ~/ros2_ws/
colcon build --packages-select kiss_icp
Launch¶
ros2 launch kiss_icp odometry.launch.py topic:=/lexus3/os_left/points
Linkes¶
- fastcampus_slam_codes tutorial: github.com/changh95/fastcampus_slam_codes
- learn opencv: learnopencv.com/lidar-slam-with-ros2