ROS 2 LIDAR Clustering¶
The goal of this short practice/workshop is to demonstrate the filtering of LIDAR data into objects. Thus, we create larger objects/clusters from individual LIDAR points. These objects can be pedestrians, cars, buildings, etc. The practice is compatible with ROS 2.
Requirements (high-level overview)¶
- ROS 2 Humble: 🟠 see previous materials or docs.ros.org/en/humble/Installation.html
- Log file with raw LIDAR data (MCAP format, bag) ✅
- The
patchworkpppackage for ground plane filtering ✅ - The
lidar_clusterpackage for clustering execution ✅
Video Overview¶
The following screen recording demonstrates the necessary steps:
Step 1. - Download the raw data¶
To cluster LIDAR data, we first need LIDAR data. Use one of the following 3 options.
Option A: Download MCAP from the link below¶
In our examples, the .mcap file is saved to the /mnt/c/bag/ folder. If you want to use another directory, please modify accordingly.
Option B: Download MCAP via your terminal¶
Don't forget to change the directory first.
In our case, `/mnt/c/bag/` is the place where we will put it:cd /mnt/c/bag/
wget https://laesze-my.sharepoint.com/:u:/g/personal/herno_o365_sze_hu/Eclwzn42FS9GunGay5LPq-EBA6U1dZseBFNDrr6P0MwB2w?download=1 -O lexus3-2024-04-05-gyor.mcap
Option C: Use your own MCAP¶
You can use your own MCAP file, but in this case, you need to modify the following:
- The LIDAR topic
- In our example, this is
/lexus3/os_center/points - LIDAR frame
- In our example, this is
lexus3/os_center_a_laser_data_frame
Later, don't forget to update these in the subsequent steps.
Verify the raw data¶
Play the bag with a command similar to the following:
ros2 bag play /mnt/c/bag/lexus3-2024-04-05-gyor.mcap -l
Info
The -l switch in the play command means loop playback.
Success
If everything works as expected, you should see multiple topics in another terminal
Topics
In another terminal, issue the following command:
ros2 topic list
/clock
/events/read_split
/lexus3/gps/duro/current_pose
/lexus3/gps/duro/imu
/lexus3/gps/duro/mag
/lexus3/gps/duro/navsatfix
/lexus3/gps/duro/status_flag
/lexus3/gps/duro/status_string
/lexus3/gps/duro/time_diff
/lexus3/gps/duro/time_ref
/lexus3/os_center/points
/lexus3/os_left/points
/lexus3/os_right/points
/lexus3/zed2i/zed_node/left/image_rect_color/compressed
/parameter_events
/rosout
/tf
/tf_static
Also, there must be at least one sensor_msgs/msg/PointCloud2, check with:
ros2 topic type /lexus3/os_center/points
sensor_msgs/msg/PointCloud2
Step 2 - Install ROS 2 packages¶
Info
If you don't have a ~/ros2_ws/ workspace, you will need the following command:
mkdir -p ~/ros2_ws/src
Clone patchworkpp package¶
The patchwork-plusplus-ros is the ROS 2 package of Patchwork++ (@ IROS'22), providing fast and robust LIDAR ground segmentation. We recommend the JKK-research fork, which includes some improvements, or you can use the original KAIST version.
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/patchwork-plusplus-ros
git clone https://github.com/url-kaist/patchwork-plusplus-ros -b ROS2
Clone lidar_cluster package¶
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
Build the packages¶
cd ~/ros2_ws
colcon build --packages-select patchworkpp lidar_cluster --symlink-install
Step 3 - Execution¶
What is the expected operation?¶
graph TD;
p1[ /lexus3/os_center/points<br/>sensor_msgs::PointCloud2]:::white --> patchwork([ /patchwork_node]):::light
patchwork --> p
p[ /nonground<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fffDon't forget to source
source ~/ros2_ws/install/setup.bash
ros2 bag play /mnt/c/bag/lexus3-2024-04-05-gyor.mcap -l
ros2 launch patchworkpp demo.launch.py cloud_topic:=/lexus3/os_center/points cloud_frame:=lexus3/os_center_a_laser_data_frame
ros2 launch lidar_cluster dbscan_spatial.launch.py
ros2 launch lidar_cluster euclidean_spatial.launch.py
ros2 launch lidar_cluster euclidean_grid.launch.py
ros2 launch lidar_cluster rviz02.launch.py
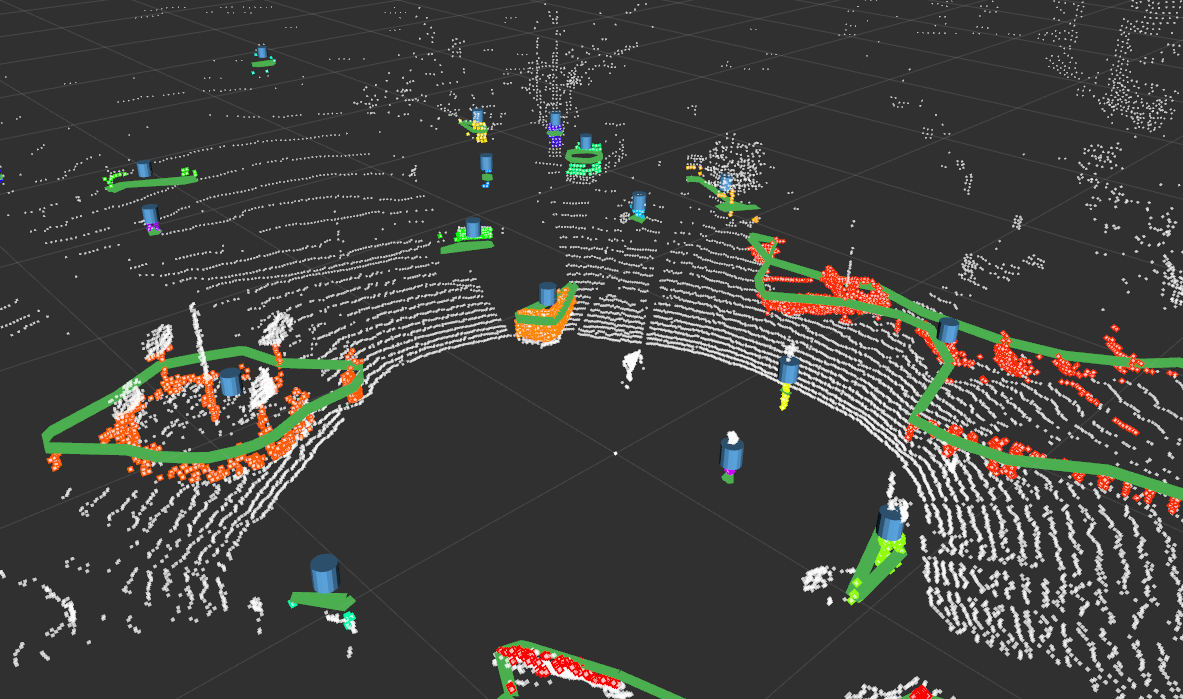
Success
If everything works as expected, you should see a similar rviz window.
Links¶
- English version of clustering jkk-research.github.io/workshops/clustering_a