Ignition Gazebo gyakorlat¶
Saját robotszimuláció létrehozása¶
A következőkben létre fogunk hozni egy egyszerű környezetet (world), valamint egy robot modellt. Ennek érdekében hozzunk létre egy simulation mappát, majd ezen belül a building_robot.sdf nevű fájlt. A mappa bárhol létrehozható, illetve a fájl neve is szabadon választható, a követhetőség érdekében érdemes a megadott módon eljárni.
mkdir simulation
cd simulation
touch building_robot.sdf
Környezet létrehozása¶
Nyissuk meg a létrehozott fájlt Visual Studio Code segítségével, majd másoljuk be az alábbi kódrészletet:
<?xml version="1.0" ?>
<sdf version="1.9">
<world name="car_world">
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
</physics>
<plugin
filename="gz-sim-physics-system"
name="gz::sim::systems::Physics">
</plugin>
<plugin
filename="gz-sim-user-commands-system"
name="gz::sim::systems::UserCommands">
</plugin>
<plugin
filename="gz-sim-scene-broadcaster-system"
name="gz::sim::systems::SceneBroadcaster">
</plugin>
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
</world>
</sdf>
simulation mappából:
cd ~/simulation
ign gazebo building_robot.sdf
Indítást követően a leírtaknak megfelelő üres környezetet kell látnunk:
Robot modell létrehozása¶
Folytassuk a building_robot.sdf szerkesztését, a </model> címkét követően. Észrevehető, hogy a talajt, vagyis a ground_plane elemet is modellként adtuk meg, hasonló módon adjuk hozzá a járművet is.
<model name='vehicle_blue' canonical_link='chassis'>
<pose relative_to='world'>0 0 0 0 0 0</pose>
</model>
vehicle_blue . A megnevezés szabadon megválasztható, viszont fontos figyelni arra, hogy a név egyedi legyen az azonos környezeten belül használt modellek között.
A modellt felépítő elemeket (pl. karosszéria, kerekek stb.) a továbbiakban linkeknek nevezzük.
Minden modellnek lehet egyetlen ún. canonical_link eleme. Minden további modellen belül alkalmazott link ehhez fog csatlakozni. Amennyiben nem definiálunk egyetlen canonical_link elemet sem, az első link alapértelmezetten canonical típusú lesz.
A <pose> címke használatával megadható egy link pozíciója és orientációja. A címke után megadott relative_to attribútummal megadható, hogy mihez képest szeretnénk a link pozícióját és orientációját definiálni. Az attribútum megadása nélkül a pozíció megadása a környezethez képest történik. A pozíció és orientáció megadásának formátuma <pose>X Y Z R P Y</pose>, ahol X, Y és Z a frame-en belüli pozíció koordinátái, R, P és Y pedig az orientációt adja meg radiánban. A robot definiálása során minden paraméternek zérus értéket adtunk, tehát a robot és a környezet frame-je egybeesik.
Minden modell (robot) jointok (csuklók / ízületek) által összekapcsolt linkekből áll.
A robotot alkotó linkek definiálása¶
A következőkben az érthetőség kedvéért az SDF fájl magyarázata elemenként történik. Nehéz lehet követni az egyes részletek teljes kódon belüli helyét, ehhez a magyarázat végén található teljes SDF ad segítséget.
Minden link létrehozása során meg kell adnunk a következőket: 1. link neve, pozíciója 2. link inerciális tulajdonságai (tömeg és inerciamátrix) 3. vizuális és egyszerűsített (collision) geometria
- Karosszéria
Link létrehozása:
<model name='vehicle_blue' canonical_link='chassis'>
<pose relative_to='world'>0 0 0 0 0 0</pose>
<link name='chassis'>
<pose relative_to='__model__'>0.5 0 0.4 0 0 0</pose>
</link>
</model>
Inerciális tulajdonságok (a mértékegységek ebben az esetben is SI-ben értendőek):
<inertial>
<mass>1.14395</mass>
<inertia>
<ixx>0.095329</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.381317</iyy>
<iyz>0</iyz>
<izz>0.476646</izz>
</inertia>
</inertial>
Vizuális és egyszerűsített (ütközési/collision) geometria megadása:
<visual name='visual'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
</collision>
Indítsuk el a szimulációt ismét:
cd ~/simulation
ign gazebo building_robot.sdf
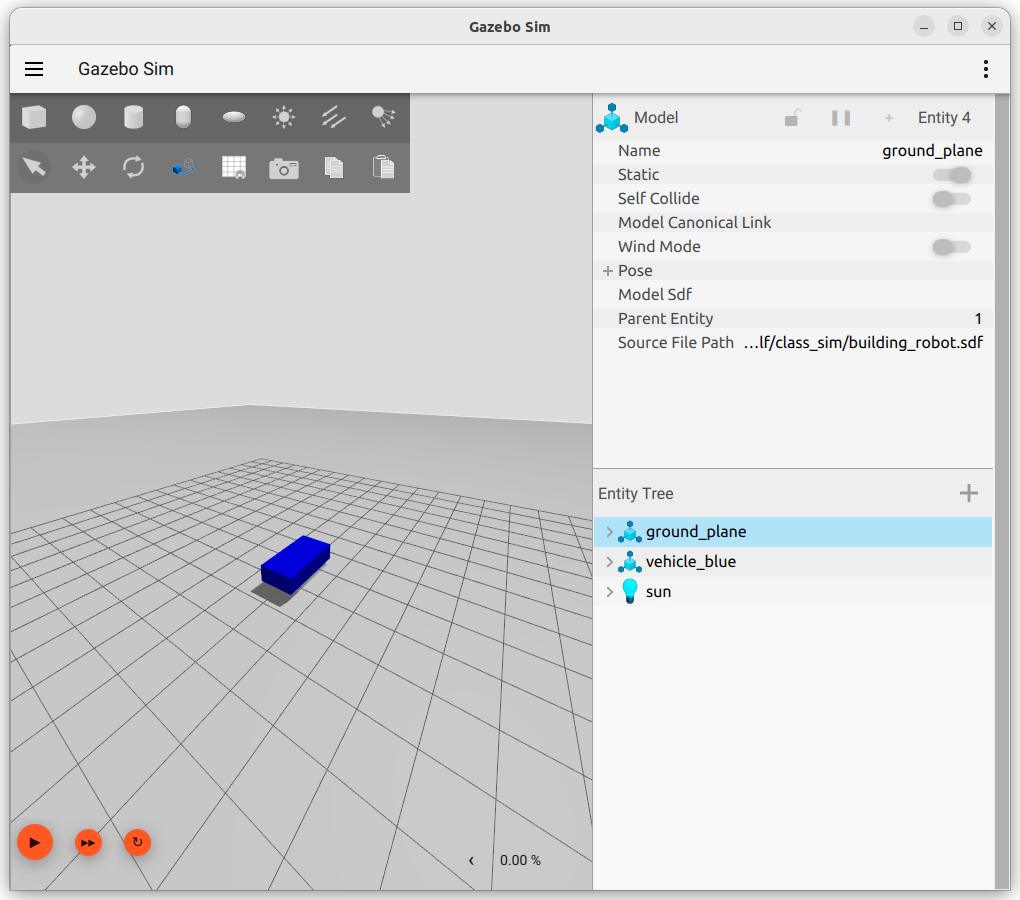
Ezt követően a szimulátorban a robot karosszériáját kell látnunk:
- Jobb és bal kerék
Hozzuk létre a robot jobb és bal (hajtott) kerekét képező linkeket. Ezt a robotot definiáló <model> címkék között kell megtennünk, ugyanis ide kerül minden olyan link definíciója, amely azonos modellen (a roboton) belül értendő.
A kerekeket hengerek (sphere) segítségével fogjuk létrehozni. A kerekeknek az Y tengely mentén kell elfordulniuk, ezért meg kell adnunk a helyes orientációjukat.
<link name='left_wheel'>
<pose relative_to="chassis">-0.5 0.6 0 -1.5707 0 0</pose>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
Vizuális és egyszerűsített (ütközési/collision) geometria megadása:
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
A bal kerék megadása analóg módon történik, csak a pozíció tekintetében (és természetesen a link nevében) tér el a jobb kerék megadásától:
<link name='right_wheel'>
<pose relative_to="chassis">-0.5 -0.6 0 -1.5707 0 0</pose> <!--szögek radiánban-->
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
- Támasztógörgő hozzáadása
Van lehetőség enyéni frame-ek létrehozására is, a támasztógörgő felépítése során ezt fogjuk tenni:
<frame name="caster_frame" attached_to='chassis'>
<pose>0.8 0 -0.2 0 0 0</pose>
</frame>
caster_frame, amely a chassis linkhez csatlakozik. A <pose> címke megadja a pozícióját és orientációját ehhez a linkhez képest, viszont a relative_to attribútumra az egyéni frame esetében nem volt szükség.
Folytatódhad a támasztógörgő definiálása:
<link name='caster'>
<pose relative_to='caster_frame'/>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.016</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.016</iyy>
<iyz>0</iyz>
<izz>0.016</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</collision>
</link>
Csuklók / ízületek (joints) definiálása¶
A korábban definiált linkek között összefüggéseket kell definiálnunk. Ezek az összefüggések fogják megadni, hogy a linkek milyen módon mozdulhatnak el egymáshoz képest. Ebből ered a definíció módjának neve is.
- Bal kerék joint
Megadjuk a joint nevét és típusát. A keréknek el kell fordulnia, ezért a revolute típust választjuk.
<joint name='left_wheel_joint' type='revolute'>
<pose relative_to='left_wheel'/>
<parent>chassis</parent>
<child>left_wheel</child>
Jelen esetben a keréknek az Y tengely körül kell elfordulnia. Teljesen, többször is körbefordulhat, ezért a mozgás korlátjai pozitív és negatív végtelen lesz.
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negatív végtelen-->
<upper>1.79769e+308</upper> <!--pozitív végtelen-->
</limit>
</axis>
</joint>
- Jobb kerék joint
A jobb kerék joint definiálása a bal kerékéhez hasonló módon történik:
<joint name='right_wheel_joint' type='revolute'>
<pose relative_to='right_wheel'/>
<parent>chassis</parent>
<child>right_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negatív végtelen-->
<upper>1.79769e+308</upper> <!--pozitív végtelen-->
</limit>
</axis>
</joint>
- Támasztókerék joint
Mivel a támasztókerék gömb, minden tengely mentén elfordulhat. Ebből adódóan esetében eltérő típusú joint kerül alkalmazásra:
<joint name='caster_wheel' type='ball'>
<parent>chassis</parent>
<child>caster</child>
</joint>
Indítsuk el a szimulációt ismét:
cd ~/simulation
ign gazebo building_robot.sdf
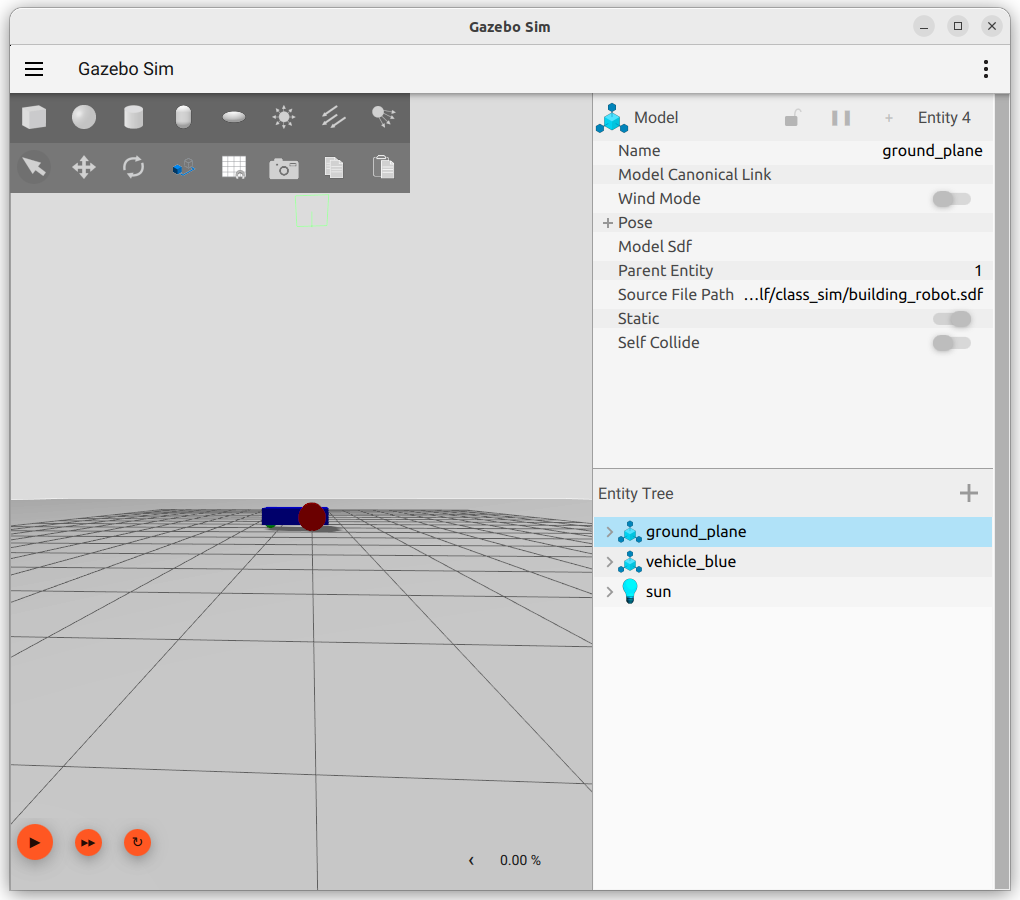
Ezt követően a szimulátorban a robotot kell látnunk:
Az eddig bemutatottakat tartalmazó XML leíró fájl tartalma:
<?xml version="1.0" ?>
<sdf version="1.8">
<world name="car_world">
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
</physics>
<plugin
filename="gz-sim-physics-system"
name="gz::sim::systems::Physics">
</plugin>
<plugin
filename="gz-sim-user-commands-system"
name="gz::sim::systems::UserCommands">
</plugin>
<plugin
filename="gz-sim-scene-broadcaster-system"
name="gz::sim::systems::SceneBroadcaster">
</plugin>
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
<model name='vehicle_blue' canonical_link='chassis'>
<pose relative_to='world'>0 0 0 0 0 0</pose> <!--alapbeállítás szerint a megadott póz a világ koordinátáihoz képest értendő-->
<!--karosszéria-->
<link name='chassis'>
<pose relative_to='__model__'>0.5 0 0.4 0 0 0</pose>
<inertial>
<mass>1.14395</mass>
<inertia>
<ixx>0.095329</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.381317</iyy>
<iyz>0</iyz>
<izz>0.476646</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
<!--Az összetevő anyagjellemzői (színe)-->
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<box>
<size>2.0 1.0 0.5</size>
</box>
</geometry>
</collision>
</link>
<!--Bal kerék-->
<link name='left_wheel'>
<pose relative_to="chassis">-0.5 0.6 0 -1.5707 0 0</pose>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
<!--Jobb kerék (ugyanaz, mint a bal kerék, a pozíció tükrözésével)-->
<link name='right_wheel'>
<pose relative_to="chassis">-0.5 -0.6 0 -1.5707 0 0</pose>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.043333</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.043333</iyy>
<iyz>0</iyz>
<izz>0.08</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
<material>
<ambient>1.0 0.0 0.0 1</ambient>
<diffuse>1.0 0.0 0.0 1</diffuse>
<specular>1.0 0.0 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.4</radius>
<length>0.2</length>
</cylinder>
</geometry>
</collision>
</link>
<!--Tetszőleges frame-->
<frame name="caster_frame" attached_to='chassis'>
<pose>0.8 0 -0.2 0 0 0</pose>
</frame>
<!--Támasztógörgő-->
<link name='caster'>
<pose relative_to='caster_frame'/>
<inertial>
<mass>1</mass>
<inertia>
<ixx>0.016</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.016</iyy>
<iyz>0</iyz>
<izz>0.016</izz>
</inertia>
</inertial>
<visual name='visual'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
<material>
<ambient>0.0 1 0.0 1</ambient>
<diffuse>0.0 1 0.0 1</diffuse>
<specular>0.0 1 0.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<sphere>
<radius>0.2</radius>
</sphere>
</geometry>
</collision>
</link>
<!--Bal kerék joint-->
<joint name='left_wheel_joint' type='revolute'>
<pose relative_to='left_wheel'/>
<parent>chassis</parent>
<child>left_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negatív végtelen-->
<upper>1.79769e+308</upper> <!--pozitív végtelen-->
</limit>
</axis>
</joint>
<!--Jobb kerék joint-->
<joint name='right_wheel_joint' type='revolute'>
<pose relative_to='right_wheel'/>
<parent>chassis</parent>
<child>right_wheel</child>
<axis>
<xyz expressed_in='__model__'>0 1 0</xyz>
<limit>
<lower>-1.79769e+308</lower> <!--negatív végtelen-->
<upper>1.79769e+308</upper> <!--pozitív végtelen-->
</limit>
</axis>
</joint>
<!--Támasztógörgő joint-->
<joint name='caster_wheel' type='ball'>
<parent>chassis</parent>
<child>caster</child>
</joint>
</model>
</world>
</sdf>
A robotplatform mozgatása¶
A korábbiakban összeállított robot mozgatásához egy plugint, pontosabban a diff_drive plugint fogunk alkalmazni.
Nyissuk meg a korábban létrehozott building_robot.sdf fájlt, és a vehicle_blue <model> címkéin belül hívjuk meg a plugint, valamint definiáljuk a használatához szükséges alapvető paramétereket:
<plugin
filename="libignition-gazebo-diff-drive-system.so"
name="ignition::gazebo::systems::DiffDrive">
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<wheel_separation>1.2</wheel_separation>
<wheel_radius>0.4</wheel_radius>
<odom_publish_frequency>1</odom_publish_frequency>
<topic>cmd_vel</topic>
</plugin>
A <plugin> címkének két attribútuma van. Az egyik a könyvtár megnevezése, amelyből a plugin származik (filename), a másik a plugin neve (name). A további címkék a differenciálhajtású robot jellemzői:
- <left_joint> és <right_joint>: azok a jointok, amelyek kapcsolatot definiálnak a robot bal- illetve jobboldali kereke, és a robot karosszériája között.
- <wheel_separation>: a hajtott kerekek közötti távolság, vagyis a nyomtáv. Mivel korábban úgy adtuk meg, hogy a jobb és bal kerék pozíciója az Y tengely mentén -0,6m és 0,6m, a kerekek távolsága 1,2m.
- <wheel_radius>: a hajtott kerekek sugara.
- <odom_publish_frequency>: az a frekvencia, amellyel a plugin által számolt odometriát publish-olni szeretnénk.
A paraméterek beállításával a modellünk kész a mozgatásra. A következő lépés az, hogy utasításokat küldjünk neki, ami a cmd_vel topic segítségével hajtható végre.
-
Indítsuk el a robotot kézi parancsmegadással
-
Az egyik terminálban indítsuk el a szimulációt:
ign gazebo building_robot.sdf -
Egy másik terminálból küldjünk utasítást a robotnak:
ign topic -t "/cmd_vel" -m ignition.msgs.Twist -p "linear: {x: 0.5}, angular: {z: 0.05}" -
Nyomjuk meg a lejátszás gombot a szimulátorban.
A fenti lépéseket követően a robotmodellnek mozognia kell.
- Mozgassuk a robotot a billentyűzet segítségével
Most a billentyűzet olvasásával, szintén ROS2 topic által fogjuk irányítani a robotot. Ehhez további két plugin alkalmazása lesz szükséges: KeyPublisher és TriggeredPublisher.
A KeyPublisher egy ign-gui plugin, amely beolvassa a billentyűzet billentyűinek lenyomását, és a /keyboard/keypress topic-ra küldi. Próbáljuk ki ezt a plugint:
- Egyik terminálban ismét indítsuk el a szimulátort:
ign gazebo building_robot.sdf
-
A szimulátor ablakának jobb felső sarkában klikkeljünk a
pluginslegördülő listára, majd aKey Publisheropcióra. -
Egy másik terminálban adjuk meg a következőt, ezzel kiírva az összes billentyűzet-lenyomást:
ign topic -e -t /keyboard/keypress
A következő lépés az, hogy a billentyűzet leütéseit megfeleltessük a robot irányítására alkalmas parancsoknak. Erre fogjuk használni a TriggeredPublisher plugint.
A TriggeredPublisher plugin általunk definiált módon hoz létre kimenetet egy adott bemenetnek megfelelően. A building_robot.sdf fájlban a <world> címkéken belül adjuk meg a következő megfeleltetést:
<plugin filename="libignition-gazebo-triggered-publisher-system.so"
name="ignition::gazebo::systems::TriggeredPublisher">
<input type="ignition.msgs.Int32" topic="/keyboard/keypress">
<match field="data">16777235</match>
</input>
<output type="ignition.msgs.Twist" topic="/cmd_vel">
linear: {x: 0.5}, angular: {z: 0.0}
</output>
</plugin>
Próbáljuk ki a robot irányítását:
- Indítsuk el a szimulátort ismét:
ign gazebo building_robot.sdf
-
Válasszuk ki a
Key Publisherplugint. -
Győződjünk meg róla, hogy fut a szimuláció, szükség esetén nyomjuk le a Lejátszás gombot.
-
Nyomjuk le a
Fel(↑) nyílbillentyűt. A robotnak el kell indulnia előre.
Önálló feladat¶
Készítsük el az összes nyílbillentyű funkcióját a korábbi kódrészlet kibővítésével. A feladat analóg módon, csak a paraméterek módosításával megoldható, az alábbi megfeleltetések segítségével:
- Balra nyíl, értéke:
16777234, paraméterek:linear: {x: 0.0}, angular: {z: 0.5} - Fel nyíl, értéke:
16777235, paraméterek:linear: {x: 0.5}, angular: {z: 0.0} - Jobbra nyíl, értéke:
16777236, paraméterek:linear: {x: 0.0}, angular: {z: -0.5} - Le nyíl, értéke:
16777237, paraméterek:linear: {x: 0.5}, angular: {z: 0.0}
Környezet kibővítése¶
Az eddig létrehozott szimulált környezet csak egy talajsíkot és napfényt tartalmaz. Hozzunk létre további környezeti elemeket primitív statikus elemek hozzáadásával. Kezdjük egyetlen téglatest, "fal" létrehozásával:
<model name='wall'>
<static>true</static>
<pose>5 0 0 0 0 0</pose><!--póz a világhoz képest-->
<link name='box'>
<pose/>
<visual name='visual'>
<geometry>
<box>
<size>0.5 10.0 2.0</size>
</box>
</geometry>
<!--adjunk hozzá anyagot (színt)-->
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<box>
<size>0.5 10.0 2.0</size>
</box>
</geometry>
</collision>
</link>
</model>
Önálló feladat¶
Adjunk hozzá a környezethez további két elemet az alábbi paraméterekkel: 1. elem - neve (name): wall1 - helyzete (pose): (0 12 0 0 0 1.5707) - mérete: (0.5 10.0 2.0) - anyaga, színe tetszőleges
- elem
- neve (name): wall2
- helyzete (pose): (0 -12 0 0 0 1.5707)
- mérete: (0.5 10.0 2.0)
- anyaga, színe tetszőleges
Szenzor hozzáadása¶
Az előző részekben kialakítottunk egy mozgatható robotszimulációt, viszont az autonóm működtetéséhez mindenképp szükséges valamilyen szenzor(ok) szimulációja is. A következő lépésekben IMU (Inertial Measurement Unit) szenzort, valamint LiDAR szenzort fogunk hozzáadni a korábban kialakított robothoz.
- IMU szenzor
Az IMU szenzor három elkülöníthető információt ad: - A szenzor orientációja kvaternion formátumban. - A szenzor szögsebessége (X, Y, Z) tengelyek körül. - A szenzor lineáris gyorsulása (X, Y, Z) tengelyek mentén.
Az IMU szenzor szintén plugin segítségével adható hozzá. Definiáljuk az IMU szenzort a korábban létrehozott fájl szerkesztésével, a <world> címkék között:
<plugin filename="libignition-gazebo-imu-system.so"
name="ignition::gazebo::systems::Imu">
</plugin>
A plugin definiálását követően definiáljuk a szenzorra vonatkozó paramétereket. A szenzor azon link paramétereit adja vissza, amelyhez hozzárendeljük. Mivel a robotra, vagyis a robot karosszériájára vonatkozó méréseket szeretnénk végezni, ezt a linket adjuk meg:
<sensor name="imu_sensor" type="imu">
<always_on>1</always_on>
<update_rate>1</update_rate>
<visualize>true</visualize>
<topic>imu</topic>
</sensor>
Az alkalmazott paraméterek a következőek:
- <always_on>: ha az értéke 1, a szenzor mindig frissíteni fogja a kimenő adatát a frissítési rátának megfelelően.
- <update_rate>: a kimenő adat frissítési frekvenciája.
- <vizualize>: ha az értéke 1, a szenzor reprezentációja vizuálisan megjelenítésre kerül.
- <topic>: a kimenő adatokat tartalmazó topic neve.
Próbáljuk ki a létrehozott szenzort.
- Mentés után indítsuk el a szimulátort:
ign gazebo building_robot.sdf
- Egy másik terminálban írjuk ki az IMU adatait. Ha a billentyűzettel mozgatjuk a robotot, változás lesz megfigyelhető a szenzoradatokban:
ign topic -e -t /imu