ROS 2 haladó
ROS 2 haladó funkciók¶
Ellenőrző kérdések
- Melyik
ROSverziót használjuk a félévben? - Mi a node?
- Mi a topic?
- Milyen típusú adatokat küldhetünk a topicokon keresztül? (példák)
ROS 2 launch fájlok¶
ROS 2 launch szemléltetés¶
flowchart LR
%% Launch file
A[LAUNCH<br>FILE]:::dark --o B1
A ---o B2
A ---o B3
D --o C1
%% SENSE THINK ACT PACKAGE
subgraph sense_think_act_package["SENSE THINK ACT<br>PACKAGE"]
direction TB
B1([Sensor<br>Node])
B2([Compute<br>Node])
B3([Motor<br>Node])
end
%% PARAMS PACKAGE
subgraph params_package["PARAMS PACKAGE"]
direction TB
C1([Robot<br>Node])
end
%% Configuration parameters
A --o D[Configuration parameters]
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fffROS 2 launch fájlok¶
Több ROS 2 node futtatása sok időt vesz igénybe és több terminálablakra van szükség. Még a kisebb projektek vagy robotok is egyszerre több node-ot futtathatnak.
Képzeljünk el egy robotot, amely a "érzékel-gondolkodik-cselekszik" (sense-think-act) modell alapján működik, és minden lépéshez külön node-ot futtat. Egy sensor_node felelős az érzékelő adatainak olvasásáért, egy compute_node fogadja ezeket az adatokat, és parancsot küld a kerekeknek, végül pedig egy motor_node fogadja a parancsot, és a szükséges feszültséget adja a motoroknak.
Ahelyett, hogy minden egyes node-ot külön terminálablakban futtatnánk minden alkalommal, amikor elindítjuk a robotot, használhatunk egy indítófájlt, hogy mindezeket egyszerre futtassuk – egyetlen parancs segítségével, egyetlen terminálablakban.
Hogyan tehetjük ezt meg?¶
Három lehetőségünk van launch fájlt írni, pythonban, yaml-ben vagy xml-ben. Ebből kettőt bemutatunk: az xml fájlok egyszerűbbek, de a python fájlok sokkal rugalmasabbak és könnyebben kezelhetőek.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | |
1 2 3 4 5 6 7 8 9 10 11 12 13 | |
flowchart LR
A([sensor_node]):::red
B[ /sensor_data]:::light
C([compute_node]):::red
D[ /cmd_vel]:::light
E([motor_node]):::red
A --> B --> C --> D --> E
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Namespace¶
Az launch fájlok csoportokba vagy névterekbe is csoportosíthatják a node-okat. Ez megkönnyíti a node-ok viselkedésének nyomon követését és figyelemmel kísérését.
Egy node-nak csak egy neve van, de a névterek több szintjéhez is tartozhat. Ezeket a névtereket perjellel (/) lehet összekapcsolni – minden névtér nélküli csomópontban mindig egyetlen / szerepel a neve előtt (pl. /sensor_node). A deklaráció során megadott névtér nélküli témakörök öröklik a csomópont névterét, ahogy az az előző ábrán is látható.
Adjuk hozzá három node-ot a sense_think_act névteréhez:
sensor_node = Node(
namespace="sense_think_act",
package="launch_pkg",
executable="sensor_node"
)
compute_node = Node(
namespace="sense_think_act",
package="launch_pkg",
executable="compute_node"
)
motor_node = Node(
namespace="sense_think_act",
package="launch_pkg",
executable="motor_node"
)
flowchart TD
A([sense_think_act/sensor_node]):::red
B[ sense_think_act/sensor_data]:::light
C([sense_think_act/compute_node]):::red
D[ sense_think_act/cmd_vel]:::light
E([sense_think_act/motor_node]):::red
A --> B --> C --> D --> E
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fffMegjegyzés: A balról jobbra elrendezés helyett a helykihasználás miatt most a fentről lefelé elrendezést használtunk.
Más package-ből származó node-ok, paraméterek¶
robot_node = Node(
namespace="core",
package="params_pkg",
executable="robot_node",
parameters=[{
"robot_name":"RobotA",
"max_speed":4.2,
"waypoints":["Home", "Room 1", "Corridor", "Home"]
}]
)
foxglove_bridge = Node(
package='foxglove_bridge',
executable='foxglove_bridge',
parameters=[{
'port': 8765,
},
]
)
ld = [compute_node,
foxglove_bridge,
sensor_node,
motor_node,
robot_node]
flowchart TD
A([sense_think_act/sensor_node]):::red
B[ sense_think_act/sensor_data]:::light
C([sense_think_act/compute_node]):::red
D[ sense_think_act/cmd_vel]:::light
E([sense_think_act/motor_node]):::red
F([foxglove_bridge]):::red
G([core/robot_node]):::red
A --> B --> C --> D --> E
B --> F
D --> F
%% D --> G
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fffTovábbi példa¶
robot_anamespace:sensor_node_a: Érzékelő adatokat publikál a/robot_a/sensor_datatopicra.control_node_a: Feliratkozik a/robot_a/sensor_datatopicra, és parancsokat küld a/robot_a/cmd_veltopicra.motor_node_a: Feliratkozik a/robot_a/cmd_veltopicra, hogy fogadja a motor parancsokat.
robot_bnamespace:sensor_node_b: Érzékelő adatokat publikál a/robot_b/sensor_datatopicra.control_node_b: Feliratkozik a/robot_b/sensor_datatopicra, és parancsokat küld a /robot_b/cmd_vel topicra.motor_node_b: Feliratkozik a/robot_b/cmd_veltopicra, hogy fogadja a motor parancsokat.
- Megosztott:
- Mindkét robot megoszt egy topicot, a
/shared/environment_data-t, ahol asensor_node_aés asensor_node_bis publikálhat vagy feliratkozhat. - Mindkét robot megoszt egy topicot, a
/shared/map_data-t, ahol amap_serverpublikál és asensor_node_aés asensor_node_bfeliratkozhat.
- Mindkét robot megoszt egy topicot, a
flowchart TB
%% Robot A
subgraph robot_a["Namespace: robot_a"]
direction TB
sensor_a([sensor_node_a]):::red
control_a([control_node_a]):::red
motor_a([motor_node_a]):::red
sensor_a --> |/robot_a/sensor_data| control_a
control_a --> |/robot_a/cmd_vel| motor_a
end
%% Robot B
subgraph robot_b["Namespace: robot_b"]
direction TB
sensor_b([sensor_node_b]):::red
control_b([control_node_b]):::red
motor_b([motor_node_b]):::red
sensor_b --> |/robot_b/sensor_data| control_b
control_b --> |/robot_b/cmd_vel| motor_b
end
map_sever([map_sever]):::red
/shared/map_data[ /shared/map_data]:::light
%% Shared Topic between Robot A and Robot B
sensor_a <--> |/shared/environment_data| sensor_b
map_sever --> /shared/map_data
/shared/map_data --> sensor_a
/shared/map_data --> sensor_b
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Videó¶
Vizualizáció és debug¶
Foxglove Studio / Lichtblick Suite¶
A Foxglove Studio egy nyílt forráskódú, robotikai adatokat vizualizáló és hibakereső eszköz. Létezik Windows, Linux és MacOS rendszerekre. A v1.87.0-ig bezárólag nyílt forráskódu volt, a v2.0.0-tól pedig ingyenesen használható, de zárt forráskódú. Az open source fejlesztést több fork, például a Lichtblick Suite vette át. Elérhető számos módon:
- önálló asztali alkalmazásként futtatható
- böngészőben hozzáférhető
- saját domainen, önállóan hostolható
A natív robotikai eszközök (mint például az ROS ökoszisztéma részei) általában csak Linux rendszeren támogatottak, de a Studio asztali alkalmazás Linuxon, Windows-on és macOS-en is működik. Akár az ROS stack más operációs rendszeren fut, a Studio képes kommunikálni a robottal zökkenőmentesen.


A Studio gazdag vizuális elemeket és hibakereső panelokat kínál - interaktív diagramoktól, 3D vizuális elemekig, kameraképektől, és diagnosztikai adatfolyamokig. Legyen szó valós idejű robotkövetésről, vagy .bag / .mcap fájlban történő hibakeresésről, ezek a panelok segítenek a különböző, általános robotikai feladatok megoldásában.
Ezek a panelok ezután egyedi elrendezésekben konfigurálhatók és összeállíthatók a projekt egyedi igényeinek és munkafolyamatainak megfelelően.
A Lichtblick Suite a Foxglove-hoz hasonló, egész pontosan a Foxglove v1.87.0 verziójának folytatása, továbbra is nyílt forráskóddal. A Lichtblick a Foxglove-hoz hasonlóan asztali alkalmazásként futtatható, és a Studio-hoz hasonlóan támogatja a .bag / .mcap fájlokat, valamint a valós idejű adatvizualizációt.
Foxglove Studio / Lichtblick Suite telepítése¶
Lichtblick Latest All platform
Rviz¶
Az Rviz2 a ROS 2 natív, nyílt forráskódú, robotikai adatokat vizualizáló és hibakereső eszköze. Ennek értelmében leginkább Linux rendszeren használható, de a Windows és macOS támogatás is folyamatosan fejlődik.
ros2 run rviz2 rviz2
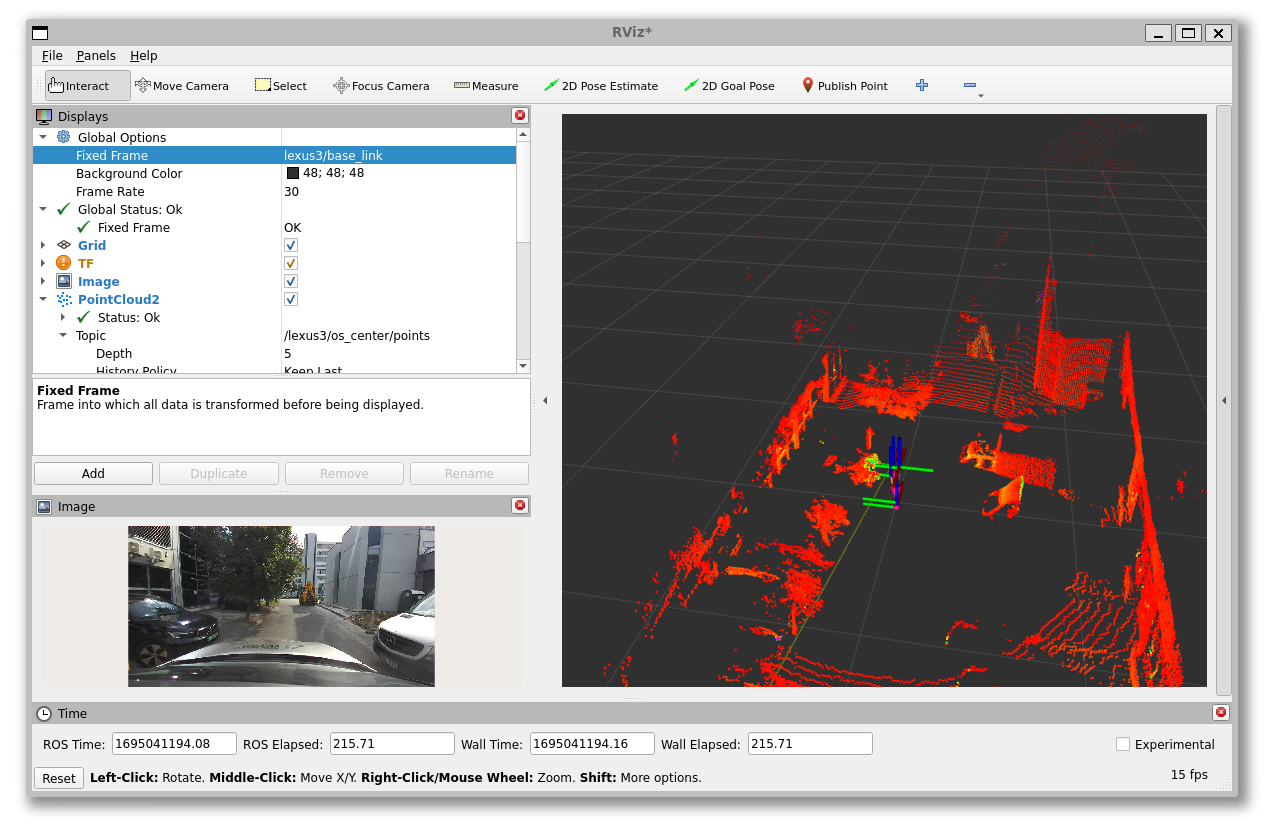
ros2 run rviz2 rviz2 --help
-d kapcsolóval betölthetünk egy .rviz konfigurációs fájlt, vagy -f fix frame-et adhatunk meg.
Bővebben: docs.ros.org/en/humble/Tutorials/Intermediate/RViz/RViz-User-Guide/RViz-User-Guide.html
rqt_graph¶
Az rqt_graph a node-ok és topic-ok vizualizációjára használható.
ros2 run rqt_graph rqt_graph

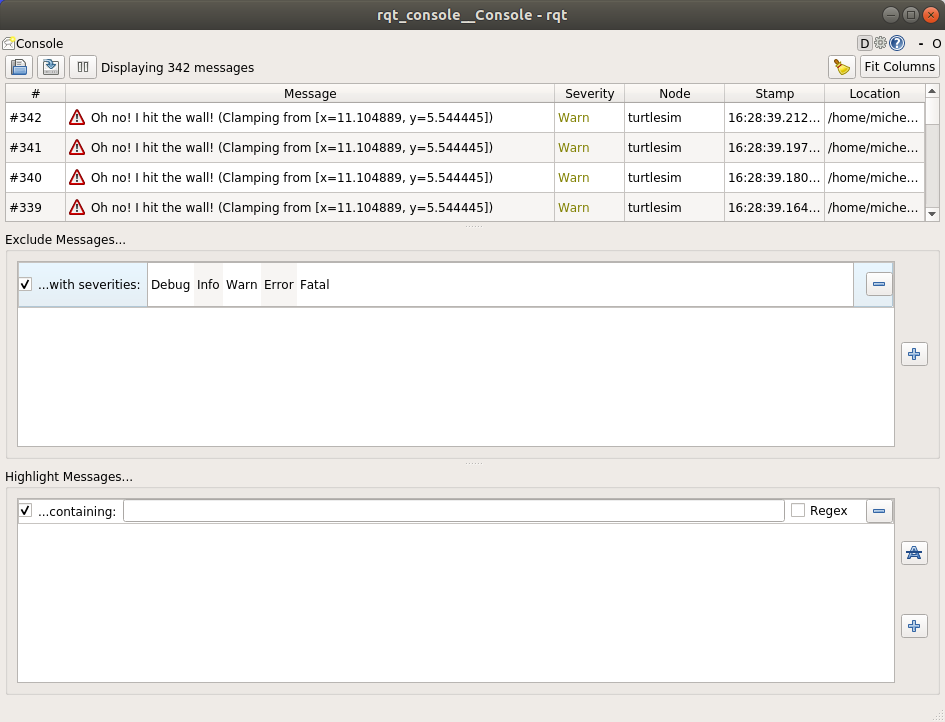
rqt_console¶
Az rqt_console log (info, debug, warn, error, fatal) üzenetek megjelenítésre, szűrésére és elemzésére használható.
ros2 run rqt_console rqt_console
rqt_tf_tree¶
Az rqt_tf_tree a transzformációk vizualizációjára használható.
ros2 run rqt_tf_tree rqt_tf_tree

rqt_reconfigure¶
Az rqt_reconfigure a node-ok paramétereinek módosítására használható.
ros2 run rqt_reconfigure rqt_reconfigure

Publish, Subscribe, Timer¶
Három alapvető műveletet célszerű ismerni, amelyeket a ROS 2-ben a node-ok használnak a kommunikációhoz:
- Timer: Időzített eseményeket hoz létre a következő példánál ez a
timer_callback()függvény. Ezen a függvényen belül például publikálhatunk egy üzenetet vagy elvégezhetünk egy számítást. - Subscribe: Feliratkozik egy topic-ra, és fogadja az adatokat. Ezt úgy éri el, hogy a példánál maradva a
callback1()függvény minden új üzenet érkezéskor meghívódik. - Publish: Adatokat küld a topic-on keresztül. Ezt általában ismétlődően tessszük, jó lehet erre a subscriber callback függvénye, vagy a timer callback függvénye.
Példa C++¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 | |
Példa python¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 | |
Források¶
- foxglove.dev/blog/how-to-use-ros2-launch-files
- youtube.com/watch?v=PqNGvmE2Pv4&t
- docs.ros.org/en/humble/Tutorials/Intermediate/Launch/Creating-Launch-Files.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Creating-Your-First-ROS2-Package.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Cpp-Publisher-And-Subscriber.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Py-Publisher-And-Subscriber.html
- docs.ros.org/en/humble/Tutorials/Intermediate/RViz/RViz-User-Guide/RViz-User-Guide.html