SLAM és LOAM¶
Simultaneous localization and mapping (SLAM) és LIDAR-based odometry and or mapping (LOAM).
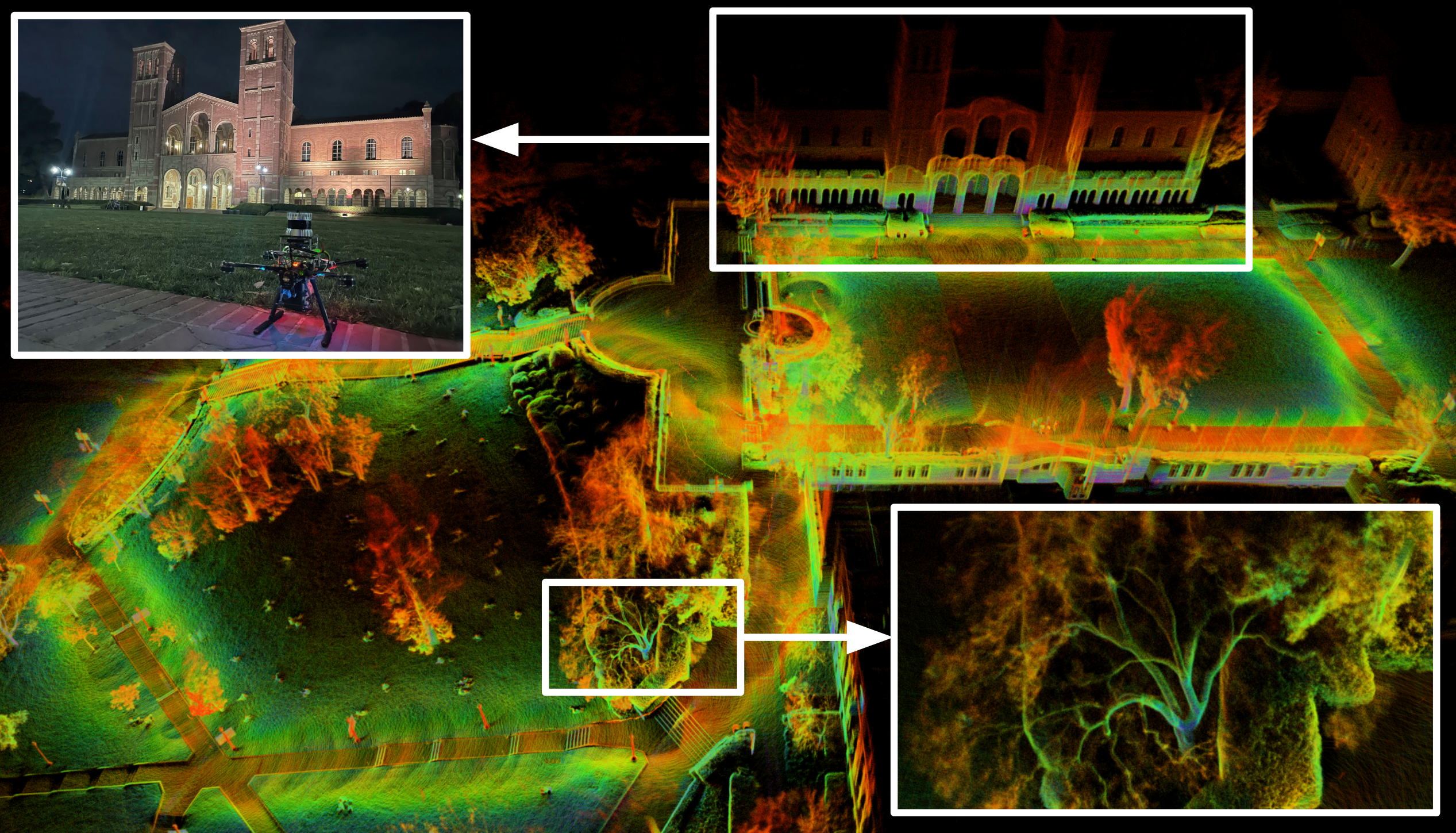
Egy győri mérésből összeállított gobális pontfelhő:

Direct LIDAR-Inertial Odometry¶
A DLIO egy könnyűsúlyú LIDAR-inerciális odometra algoritmus, amely újszerű coarse-to-fine (durva-finom) megközelítéssel folytonos idejű trajektóriát generál.
Telepítés¶
Elérhető:
- github.com/vectr-ucla/direct_lidar_inertial_odometry/tree/feature/ros2 ROS 2 branch
- github.com/jkk-research/direct_lidar_inertial_odometry csak az ROS 2 branch-et tartalmazó fork
Nézzük meg, hogy telepítve van-e a pcl-ros:
sudo apt install ros-humble-pcl-ros
sudo apt install ros-jazzy-pcl-ros
sudo apt install ros-$ROS_DISTRO-pcl-ros
cd ~/ros2_ws/src/
git clone https://github.com/jkk-research/direct_lidar_inertial_odometry
cd ~/ros2_ws/
colcon build --packages-select direct_lidar_inertial_odometry
Futtatás¶
code ~/ros2_ws/src/direct_lidar_inertial_odometry/launch/dlio.launch.py
rviz = LaunchConfiguration('rviz', default='true')
pointcloud_topic = LaunchConfiguration('pointcloud_topic', default='/lexus3/os_center/points')
imu_topic = LaunchConfiguration('imu_topic', default='/lexus3/os_center/imu')
Első opció: Colon-nál vagy --symlink-install-t használunk: ekkor a fájlok forrásból való másolása helyett szimbolikus hivatkozásokat használ. Így elkerülhető, hogy pl. minden egyes launch fájl módosítás esetén újra kelljen buildelni a package-t.
cd ~/ros2_ws/ && colcon build --symlink-install --packages-select direct_lidar_inertial_odometry
Második opció: újra buildelünk minden egyes launch fájl módosítás esetén:
cd ~/ros2_ws/ && colcon build --packages-select direct_lidar_inertial_odometry
KISS-ICP¶
KISS-ICP egy LIDAR odometria pipeline megoldás, amely tegtöbb esetben komolyabb paraméter állítás nélül is jól működik.

Telepítés¶
cd ~/ros2_ws/src/
git clone https://github.com/PRBonn/kiss-icp
cd ~/ros2_ws/
colcon build --packages-select kiss_icp
Futtatás¶
ros2 launch kiss_icp odometry.launch.py topic:=/lexus3/os_left/points
Linkek¶
- fastcampus_slam_codes oktatóanyag: github.com/changh95/fastcampus_slam_codes
- learn opencv: learnopencv.com/lidar-slam-with-ros2