ROS 2 LIDAR klaszterezés¶
A rövid gyakorlat / workshop célja, hogy a LIDAR adatok objektumokká történő szűrését bemutassa. Tehát az egyes LIDAR pontoból nagyobb objektumoat / klasztereket készítünk. Ezek az objektumok lehetnek gyalogosok, autók, épületek stb. A gyakorlat ROS 2 kompatibilis.
Követelmények (magas szintű áttekintés)¶
- ROS 2 Humble: 🟠 lásd a korábbi tananyagok vagy a docs.ros.org/en/humble/Installation.html
- Logfájl nyers LIDAR adatokkal (MCAP formátum, bag) ✅
- A
patchworkppcsomag az alapsík kiszűrésére ✅ - A
lidar_clustercsomag a klaszterezés végrehajtásához ✅
Videó áttekintése¶
A következő képernyőfelvétel bemutatja a szükséges lépéseket:
0. lépés - Előfeltételek¶
Mielőtt elkezdenénk, győződjünk meg arról, hogy a következő előfeltételek teljesülnek:
- Van egy működő
ROS 2 Humbletelepítésünk - Van egy
ros2_wsworkspace-ünk pcl-rostelepítve van
sudo apt install ros-humble-pcl-ros
sudo apt install ros-jazzy-pcl-ros
sudo apt install ros-$ROS_DISTRO-pcl-ros
Tanteremben futtassuk ezt a parancsot:
/mnt/kozos/script/update_ros2_key.sh
További olvasnivaló a Troubleshooting fejezetben.
1. lépés. - Ha még nincs meg korábbról, töltsük le a nyers adatokat¶
A LIDAR adatok klaszterezéséhez először – nem meglepő módon – LIDAR adatokra van szükség. Használja a következő 3 lehetőség valamelyikét, amennyiben még nincs meg az elsőző gyakorlatokból.
A lehetőség: MCAP letöltése az alábbi linkről¶
Példáinkban az .mcap fájl a /mnt/c/bag/ mappába kerül mentésre. Ha másik könyvtárat szeretne használni, kérjük, módosítsad azt ennek megfelelően.
B lehetőség: Töltsük le MCAP-unkat a terminálján keresztül¶
Ne felejtse el először a könyvtárat módosítani.
Esetünkben a `/mnt/c/bag/` a hely, ahova tenni fogjuk:cd /mnt/c/bag/
wget https://laesze-my.sharepoint.com/:u:/g/personal/herno_o365_sze_hu/Eclwzn42FS9GunGay5LPq-EBA6U1dZseBFNDrr6P0MwB2w?download=1 -O lexus3-2024-04-05-gyor.mcap
rsync -avzh --progress /mnt/kozos/measurement_files/lexus3-2024-04-05-gyor.mcap /mnt/c/temp/
C lehetőség: Saját MCAP használata¶
Használhatunk saját MCAP fájt, de ebben az esetben a következőket kell módosítani:
- A LIDAR topic
- Példánkban ez a
/lexus3/os_center/points - LIDAR frame
- Példánkban ez a
lexus3/os_center_a_laser_data_frame
Később se felejtsük el frissíteni ezeket a további lépésekben.
Ellenőrizzük a nyers adatokat¶
Játsszuk le a bag-et következőhöz hasonló paranccsal:
ros2 bag play /mnt/c/temp/lexus3-2024-04-05-gyor.mcap -l
Info
Az -l kapcsoló a play parancsban végtelenített lejátszást jelent.
Success
Ha minden a várt módon működik, több topicot kellene látnunk egy másik terminálon
Topic-ok
Egy másik terminálkiadásban a következő parancsot adjuk ki:
ros2 topic list
/clock
/events/read_split
/lexus3/gps/duro/current_pose
/lexus3/gps/duro/imu
/lexus3/gps/duro/mag
/lexus3/gps/duro/navsatfix
/lexus3/gps/duro/status_flag
/lexus3/gps/duro/status_string
/lexus3/gps/duro/time_diff
/lexus3/gps/duro/time_ref
/lexus3/os_center/points
/lexus3/os_left/points
/lexus3/os_right/points
/lexus3/zed2i/zed_node/left/image_rect_color/compressed
/parameter_events
/rosout
/tf
/tf_static
Also there must be at least one sensor_msgs/msg/PointCloud2, check with:
ros2 topic type /lexus3/os_center/points
sensor_msgs/msg/PointCloud2
2. lépés - ROS 2 package-ek telepítése¶
Info
Amennyiben nincs ~/ros2_ws/ workspace, a következő parancsara lesz szükségünk:
mkdir -p ~/ros2_ws/src
Clone patchworkpp package¶
A patchwork-plusplus-ros a Patchwork++ (@ IROS'22) ROS 2 csomagja, amely gyors és robusztus LIDAR talajszegmentálást biztosít. Javasoljuk a JKK-research fork-ot, amely néhány fejlesztést tartalmaz, vagy használhatjuk az eredeti KAIST változatát is.
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/patchwork-plusplus-ros
vagy az eredeti KAIST verzió ROS2 branch-e (-b kapcsoló):
git clone https://github.com/url-kaist/patchwork-plusplus-ros -b ROS2
Linkek:
- github.com/jkk-research/patchwork-plusplus-ros
- github.com/url-kaist/patchwork-plusplus-ros (ROS2 branch)
Clone lidar_cluster package¶
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
Build¶
cd ~/ros2_ws
colcon build --packages-select patchworkpp lidar_cluster --symlink-install
3. lépés - Futtatás¶
Milyen az elvárt működés?¶
graph TD;
rosbag2_player([ /rosbag2_player]):::light --> p1[ /lexus3/os_center/points<br/>sensor_msgs::PointCloud2]:::white
p1 --> patchwork([ /patchwork_node]):::light
patchwork --> p
p[ /nonground<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fffNe felejtsünk el source-olni
source ~/ros2_ws/install/setup.bash
ros2 bag play /mnt/c/temp/lexus3-2024-04-05-gyor.mcap -l
ros2 launch patchworkpp demo.launch.py cloud_topic:=/lexus3/os_center/points cloud_frame:=lexus3/os_center_a_laser_data_frame
ros2 launch lidar_cluster dbscan_spatial.launch.py
ros2 launch lidar_cluster euclidean_spatial.launch.py
ros2 launch lidar_cluster euclidean_grid.launch.py
ros2 launch lidar_cluster rviz02.launch.py
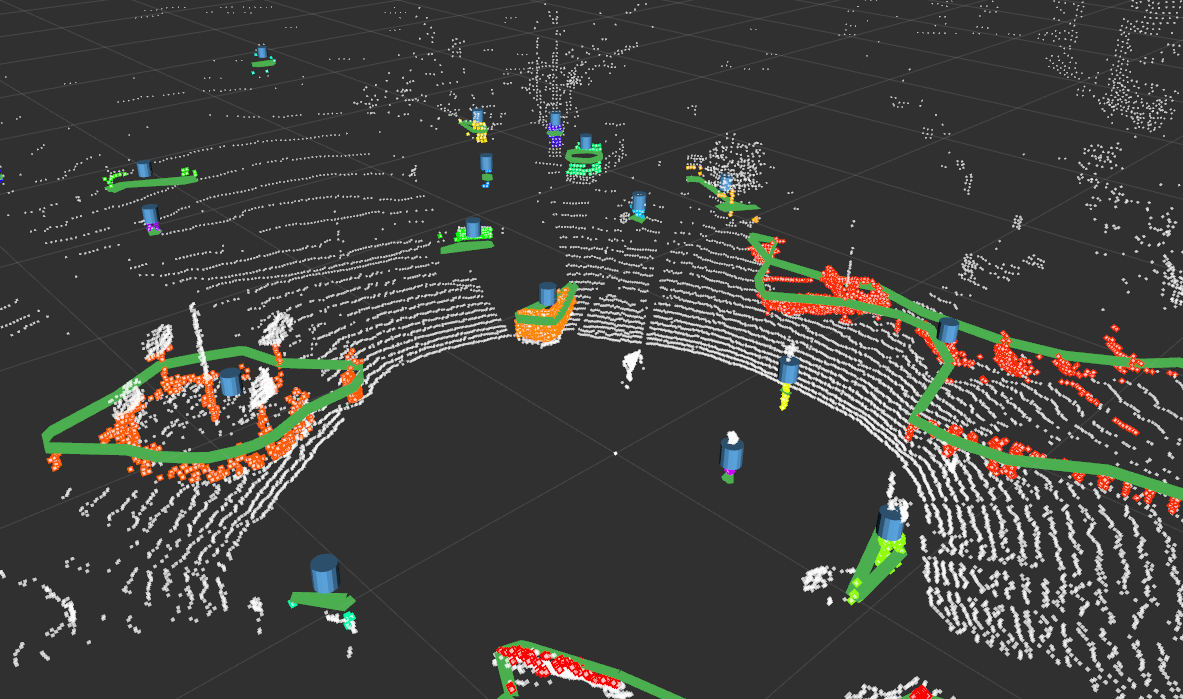
Success
Ha minden a várt módon működik, hasonló rviz ablakot kell látnunk.
graph TD;
p1[ /lexus3/os_center/points<br/>sensor_msgs::PointCloud2]:::white --> patchwork([ /patchwork_node]):::light
patchwork --> p2
p2[ /nonground<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
p1 -.-> rviz2([ /rviz2]):::light
p2 -.-> rviz2
f1 -.-> rviz2
f2 -.-> rviz2
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fffForráskódok¶
Vizsgáljuk meg a forráskódokat a lidar_cluster és a patchworkpp package-ben.
euclidean_grid_core.hppdbscan_spatial.hppeuclidean_grid.launch.pydbscan_spatial.launch.pypatchworkpp.hpp
Linkek¶
- English version of clustering jkk-research.github.io/workshops/clustering_a