Észlelés¶
Az észlelés (perception) az érzékelt nyers adatokból történő információ kinyerése.

Ellenőrző kérdések
- Egy frame-nek hány szülője lehet? (transzformációk témakör)
- Mit értünk pose (vagy póz / helyzet) alatt (robotikában)? ROS-ben hogyan adhatjuk meg? (transzformációk témakör)
- Mit jelenít meg az
rqt_tf_tree, azrvizés azrqt_graph? (ROS 2 alapfogalmak témakör) - Mik a launch fájlok és mire használjuk őket? (ROS 2 haladó témakör)
- Mit jelent az érzékelés (sensing)? (érzékelés témakör)
Az észlelési feladatok csoportosítása¶
Célok szerint¶
- Objektumfelismerés (detekció), pl:
- Gyalogos, biciklis jármű felimerés
- Tábla felismerés, jelzőlámpa felismerés
- Vezethető felület és fogalmi sáv felismerés (lokalizációhoz és tervezéshez is)
- Objektumklasszifikáció:
- A már felismert objektumok osztályzása. Pl a jelzőlámpa milyen színű éppen, melyik jármű kisteherautó és melyik lovaskocsi.
- Objektum követés és predikció:
- Merre haladtak eddig a járművek, gyalogosok illetve becslés, hogy merre haladnak majd a jövőben. Ez összefügghet a klasszifikációval, hiszen bár egy lovaskocsi méretre hasonló egy utánfutós autóhoz, mégis egész más gyorsulásra képes. Az így gyűjtött infromációnak megfeleően lehet útvonalat, tarjektóriát tevezni.
- Lokalizáció és térképépítés
- SLAM: nem illetve nem csak GNSS alapú helymeghatározás kiegészítése lokális térképp készítéssel. LOAM: LIDAR alapú odometria.
Szenzorok szerint¶
A felhasznált szenzorok alapján lehet:
- LIDAR
- Kamera
- Radar
- IMU
- GNSS/GPS
- Mikrofon
- A fenti szenzorok tetszőleges kombinációja
Danger
Magyar nyelven könnyű összekeverni az érzékelés (sensing) és az észlelés (perception) foglamakat. Az észlelés összetett funkció a nyers adatokból feldolgozott, értelmezett kimenet előállításával foglakozik.
Összefoglaló ábra¶
flowchart LR
L[Tervezés]:::light
subgraph Perception [Észlelés]
T[Térképezés]:::light
H[Lokalizáció]:::light
P[Objektum
predikció]:::light
D[Objektum
detekció]:::light
K[Objektum
klasszifikáció]:::light
D-->K
end
subgraph Sensing [Érzékelés]
GPS[GPS/GNSS]:::light -.-> T
GPS -.-> H
LIDAR[LIDAR]:::light
KAM[Kamera]:::light
IMU[IMU]:::light
LIDAR -.-> D
LIDAR -.-> P
LIDAR -.-> T
KAM-.-> P
KAM-.-> D
IMU-.-> T
D-.->P
end
T -->|térkép| L
H -->|pose| L
P -->|obj.| L
K -->|obj.| L
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Ez a tananyagrész a TU München Autonomous Driving Software Engineering tantárgy tananyagán alapszik, amit az Institute of Automotive Technology intézet munkatársai állítottak össze. Az órai videó elérhető német nyelven:
Kihívások, nehézségek¶
Számos kihívás nehezítheti a felismerést illetve annak pontosságát:
- Időjárás (eső, hó, köd, ...)
- Napszak (éjszaka, naplemente, napfelkelte ...)
- Takarás (objektumok csak részlegesen látszanak)
- Számítási idő (nagyobb sebességeknél hatványozottan)
- Különböző könyezetek (városi, autópálya, erdős szakasz ...)
Use case (esettanulmányok)¶
Mivel az észlelés minden egyes aspektusát nehéz lenne bemutani, inkább pár use-case segítségével mutatnánk be.
Kamera-alapú jelzőlámpa klasszifikáció¶
Mesterséges intelligencia (neurális háló: YOLOv7) segítségével kamerakép feldolgozás.
LIDAR-alapú egyszerű magasság szűrés¶
A gyakorlaton is előkerülő feladat egyszerű LIDAR szűrés, X, Y és Z koordináták szerint. Mivel a LIDAR a 3D környezet egyszerű reprezentációját adja bizonyos szempontból könnyebb dolgunk van vele, mint a kamerával. Gyakori technológia, hogy az út szintjét szűrik ki a LIDAR adatból(ground-segmentation), majd a maradék pontok (non-ground) jelentik az összes objektumot. Itt egy sokkal egyszerűbb technológiát demonstrálunk:
Klaszterezés¶
Miután az út szintjét kiszűrtük a LIDAR adatból (ground-segmentation), út pontok (ground) és maradék pontok (non-ground) keletkeztek. A non-ground pontokat természetesen klaszterezni (cluster) kell, hogy kialakuljanak az objektumokat leíró pontok. A klaszterezés lényege, hogy egy adott objektum (pl egy autó) pontjai egymáshoz közel állnak.
Forrás: codeahoy.com
Forrás: saját
Szenzorfúzió¶
A következő videó egy való életből vett példán keresztül mutatja be az észlelést.
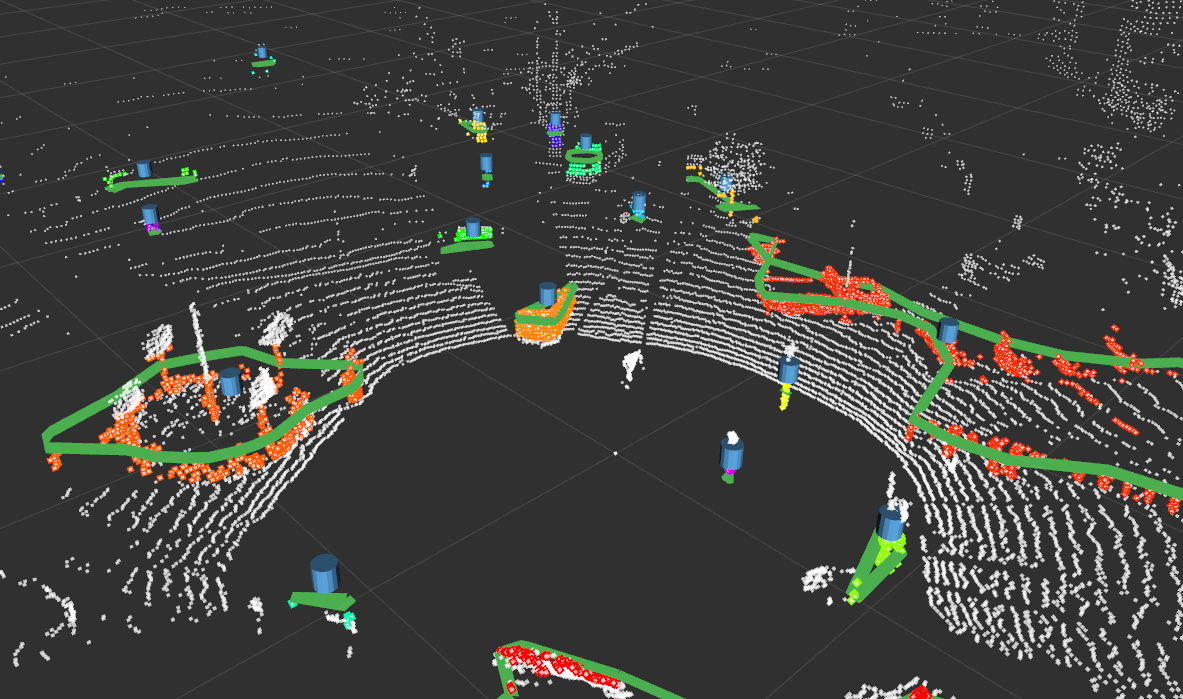
LIDAR-alapú útfelület / padka detekció¶
Egyetemünk egyik saját fejlesztésű algoritmusa.
LIDAR-alapú objektum követés és predikció¶
LIDAR alapú lokálizáció¶
SLAM LIDAR és kamera fúzió¶
A Simultaneous Localization and Mapping (SLAM) lényege, hogy egy mozgó rendszer (robot vagy jármű) pozícióját és a környezetét térképezze egyszerre, miközben navigál.