Érzékelés¶
Az érzékelés nyers adatok beolvasását jelenti.

Érzékelés esetében fontos felhívi a figyelmet, hogy ez még nem jelent magas szintű adatfeldolgozást. Szenzorai lehetnek kamerák, mikrofonok, LIDAR-ok stb. Ahogy az ábra is mutatja a tananyagban az érzékeléssel együtt tárgyaljuk az aktuálást is.
Note
Magyar nyelven könnyű összekeverni az érzékelés (sensing) és az észlelés (perception) foglamakat. Az érzékelés egyszerű driver szintű nyers adatok előállításával foglakozik.
Ellenőrző kérdések
- Melyik ROS verziót használjuk a félévben?
- Mi a topic? Milyen típusú üzenetekről volt szó?
- Mi a node?
- Mi a különbség a publisher és a subscriber között?
Kamera¶
A kamera az érzékelőjére (pl CCD CMOS szenzor) érkező fényt elektronikus jellé alakítja, diitálisan. Megkülönböztethetünk mono, sztereo vagy mélységérzékelésre képes kamerákat is.
- Jellemző gyártók: Allied Vision, Basler, Stereolabs, Orbbec, Intel
- Jellemző interfész: GigE, USB3
- Jellemző
ROS 2topic típusok:sensor_msgs/msg/Image,sensor_msgs/msg/CameraInfo

Mélységesztimáció:
Lokalizáció kamerával:
LIDAR¶
A LIDAR (Light Detection and Ranging) szenzor egy olyan eszköz, amely lézerpulzusokkal és azok visszaverődési idejéből távolságokat képes megállapítani. Az elve hasnoló a lézeres távolságmérőhöz, ám a mérés gyakorisága és frekvenciája is sokkal naygobb annál. Példaképp vegyünk egy forgó 64 csatornás LIDAR-t. Ez jellemzően 10 vagy 20 Hz-en mér, tehát másodpercenként 10 vagy 20 teljes 360°-os körbefordulást tesz meg. A 64 csatorna azt jelenti, hogy minden pillanatban 64 egymás alatti érzékelő érzékel. Egy körbefordulást jellemzően 512 / 1024 / 2048 mérést jelent csatornánként. Innen ki is számolható a másodpercenkénti mérésadat: pl 20*64*1024 = 1 310 720. Tehát jellemzően másodpercenként, több mint egymillió 3D pontot mér az eszköz, amihez intenzitás, ambient, reflektív tulajdonságok is társulnak.
- Jellemző gyártók: Velodyne, Ouster, Livox, SICK, Hokuy, Pioneer, Luminar, Hesai, Robosense, Ibeo, Innoviz, Quanenergy, Cepton, Blickfeld, Aeva
- Jellemző interfész: GigE
- Jellemző
ROS 2topic típusok:sensor_msgs/msg/PointCloud2,sensor_msgs/msg/LaserScan
LIDAR gyártókat, dataseteket, algoritmusokat tartlamazó gyűjtemény: github.com/szenergy/awesome-lidar.


Radar¶
- Jellemző gyártók: Aptiv, Bosch, Continental, Denso
- Jellemző interfész: CAN bus
- Jellemző
ROS 2topic típusok:radar_msgs/msg/RadarTrack
A LIDAR és a kamera jellemzőinek összehasonlítása
IMU¶
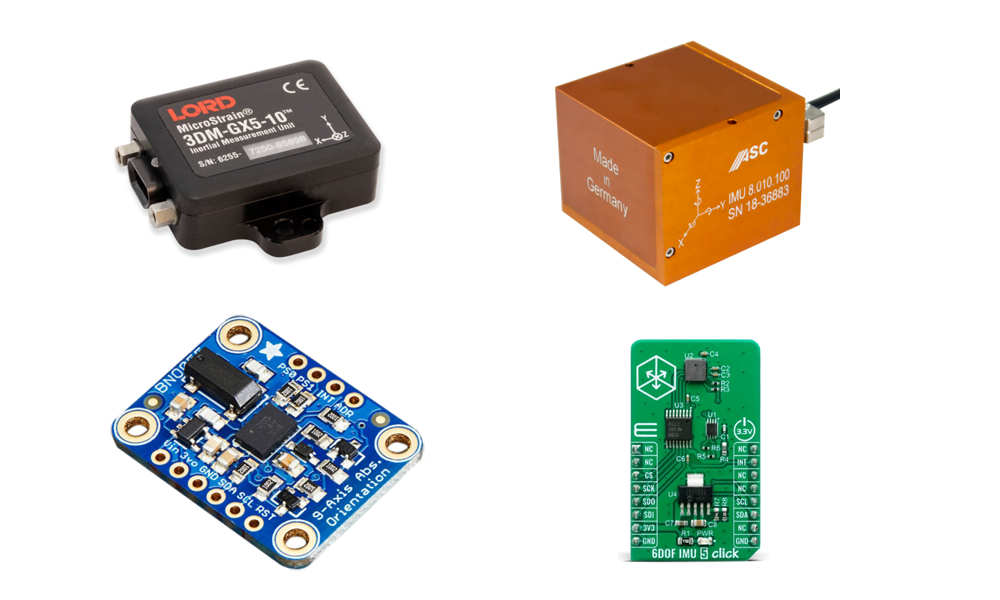
Az IMU kis méretű elektromechanikus giroszkópokat és gyorsulásmérőket, valamint jelfeldolgozó processzorokat tartalmazó szenzor. Gyakran kombinálják további szenzorokkal, pl. barometrikus magasságmérővel, magnetométerrel, iránytűvel. Némely GPS (GNSS) rendszerben is megtalálhatók.
- Jellemző gyártók: Lord MicroStrain, Bosch, XSens
- Jellemző interfész: Serial, Ethernet, USB, CAN bus
- Jellemző
ROS 2topic típusok:sensor_msgs/msg/Imu,sensor_msgs/msg/MagneticField
GNSS (GPS)¶
A GNSS (global navigation satellite system) globális szatelit-alapú navigációs rendszert jelent, köznapi szóhasználatban ezt szokás GPS-nek nevezni. Ha pontosak szeretnénk lenni, akkor a GPS csupán az első ilyen technológia ezen kívül létezik még GLONASS, BeiDou, Galileo és QZSS rendszer is, ezek üzemeltetése különböző államokhoz / szövetségekhez kötődik.
- Jellemző gyártók: SwiftNavigation, VectorNav, Ublox, NovaTel
- Jellemző interfész: GigE, CAN bus
- Jellemző
ROS 2topic típusok:sensor_msgs/msg/NavSatFix,geometry_msgs/msg/PoseStamped

Rövid, de jó leírás a GNSS pontosságról: www.sbg-systems.com/news/mastering-accurac-gnss-and-its-errors-sources/
CAN bus¶
A CAN bus (Controller Area Network) egy jellemően autóipari szabvány, mely lehetővé teszi a mikrokontrollerek és az eszközök számára, hogy központi egység (host) nélkül kommunikáljanak egymással. Az ethernet kommunkációval összevetve egyszerűbb megvalósítás, alacsonyabb sávszélességű, robosztus.
- Sebesség adat lekérdezése, refencia jel
- Kormányszög adat lekérdezése, refencia jel
- Jellemző
ROS 2topic típusok:can_msgs/msg/Frame,geometry_msgs/msg/Twist

ROS 2 időkezelés¶
Az ROS idő kezelésre a Unix-időt, vagy a POSIX-időt használja. Ez a UTC (greenwichi idő) szerinti 1970. január 1. 00:00:00 óta eltelt másodpercek és nanoszekundumok számát jelenti (int32 sec, int32 nsec). Ez egyrészt relatív kis helyet foglal a memóriában, másrészt könnyen számolható két időpont között eltelt idő, mégpedig egy egyszerű kivonással.
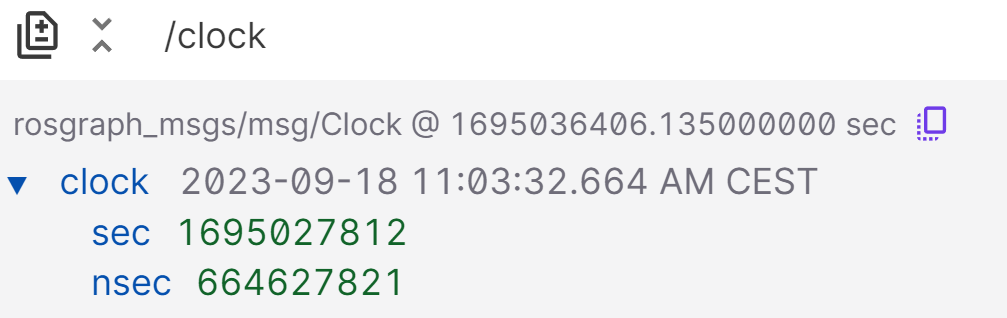
Hátránya, hogy nem túl intuitív, nem olvasható az ember számára. Pl. a Foxglove Studio ezért is gyakran átalakítja olvashatóbb formátumra.
A másodpercek és nanoszekundumok a következőképp képzelhetők el:
import rclpy
current_time = node.get_clock().now()
print(current_time.to_msg())
Output:
sec=1694595162, nanosec=945886859
Az időbélyeg több helyen is szerepet kap:
ros2 topic echo /clock --once
clock:
sec: 1689687476
nanosec: 770421827
ros2 topic echo --once /lexus3/gps/duro/current_pose
header:
stamp:
sec: 1694595162
nanosec: 945886859
frame_id: map
pose:
position:
x: 640142.9676535318
y: 5193606.439717201
z: 1.7999999523162842
orientation:
x: 0.008532664424537166
y: 0.0018914791588597107
z: 0.44068499630505714
w: 0.8976192678279703
Ha szeretnénk átválatni a másodperceket és nanoszekundumokat, azt a következő módon tehetjük meg:
from datetime import datetime
current_time_float = current_time.to_msg().sec + current_time.to_msg().nanosec / 1e9 # 1e9 is 1,000,000,000: nanosec to sec
print("As a float:\t%.5f" % (current_time_float))
print("ISO format:", end="\t")
print(datetime.utcfromtimestamp(current_time_float).isoformat())
Output:
As a float: 1694595162.94589
ISO format: 2023-09-13T08:52:42.945887