ROS 2 bevezetés és gyakorlat¶
Emlékeztető¶
Pár alapfogalom az előző alkalomról:
- Node: Gyakorlatilag ROS programot jelent. (pl.
turtlesim_node,cmd_gen_node,foxglove_bridge) - Topic (topik): Nevekkel ellátott kommunikációs csatorna. (pl.
/turtle1/cmd_vel,/turtle1/pose,/raw_cmd) - Message (üzenet): (pl.
std_msgs/msg/Bool,geometry_msgs/msg/Twist,turtlesim/msg/Pose) - Package (csomag): ROS programok (node-ok) gyűjteménye (pl.
turtlesim,arj_intro_cpp,arj_transforms_cpp) - Launch fájlok: Több node paraméterezett elindítására alkalmas (pl.
multisim.launch.py,foxglove_bridge.launch.xml,foxglove_bridge.launch.py) - Publish / subscribe: Üzenetekre történő publikálás és feliratkozás.
- Build: A package forráskódjából futtatható állományok készítésének folyamata. ROS2-ben a
colconaz alapértelmezett build eszköz.
0. feladat - Gazebo 3D szimuláció¶
Próbáljuk, ki, hogy a parancsok működnek-e. (Később részletes telepítést is bemutatunk, egyelőre ez szemléltetés.)
ign gazebo
ign gazebo -v 4 -r ackermann_steering.sdf
ign gazebo shapes.sdf
ign param --versions
Szimuláció clone és build¶
Lépjünk a ~/ros2_ws/ mappába.
cd ~/ros2_ws/src
Klónozzuk a szükséges package-t.
git clone https://github.com/robotverseny/robotverseny_gazebo24
git clone https://github.com/robotverseny/megoldas_sim24
Build¶
cd ~/ros2_ws
colcon build --symlink-install --packages-select robotverseny_application robotverseny_description robotverseny_bringup robotverseny_gazebo megoldas_sim24
Futtatás¶
Ne felejsünk source-olni ROS parancsok előtt.
source ~/ros2_ws/install/setup.bash
ros2 launch robotverseny_bringup roboworks.launch.py
ros2 launch megoldas_sim24 megoldas1.launch.py
vagy:
ros2 launch megoldas_sim24 megoldas2.launch.py

Hasznos parancsok¶
Publikálhatjuk a /roboworks/cmd_vel topicra a következő üzenetet:
ros2 topic pub --once /roboworks/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.5, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: -0.01}}"
Teleop twist keyboard:
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r /cmd_vel:=/roboworks/cmd_vel
1. feladat - Node és publish - Turtlesim 2D szimuláció¶
Nyissunk két terminált. Az első terminálból indítsuk a beépített turtlesim_node szimulátort, ami a turtlesim package-ben található.
ros2 run turtlesim turtlesim_node
Megjegyzés: ha esetleg valamiért hiányozna, telepíthető a sudo apt install ros-humble-turtlesim paranccsal.
A második ablakból publikáljunk egy parancsot, melynek hatására körbe fordul:
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist '{linear: {x: 0.5, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.2}}'
A háttérben a turtlesim_node node (kerek jelölés) feliratkozik a /turtle1/cmd_vel topicra (szögletes jelölés), ennek hatására indul a mozgás.
flowchart LR
C[ /turtle1/cmd_vel]:::light -->|geometry_msgs/msg/Twist| S([turtlesim_node]):::red
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
Ahogy a flowcharton is látszik, a /turtle1/cmd_vel típusa geometry_msgs/msg/Twist. Ezt a következő parancsból tudhatjuk meg:
ros2 topic type /turtle1/cmd_vel
A geometry_msgs/msg/Twist a üzenet strutúráját pedig ez a parancs adja:
ros2 interface show geometry_msgs/msg/Twist
Vector3 linear
float64 x
float64 y
float64 z
Vector3 angular
float64 x
float64 y
float64 z
ros2 topic list
Az adott topic tartalmát, különböző formátumban, szűrésekkel a következőképp lehet kiíratni vagy fájlba iratni:
ros2 topic echo /turtle1/pose
ros2 topic echo /turtle1/pose --csv
ros2 topic echo /turtle1/pose --csv > turtle_data_01.csv
ros2 topic echo /turtle1/pose --once
ros2 topic echo /turtle1/pose --once | grep velocity
ros2 topic echo /turtle1/pose --field x
ros2 topic echo /turtle1/pose --field linear_velocity
ros2 topic echo /turtle1/cmd_vel --field linear.x
Példa kimenet:
x: 6.2
y: 4.0
theta: 0.0
linear_velocity: 0.0
angular_velocity: 0.0
Tip
A ros2 topic echo --help parancsot kiadva további használatra vonatkozó leírást kapunk. A --help kapcsoló természetesen a többi ros2 parancsnál is használható.
Workspace és build tudnivalók¶
Első lépésként az ls ~ | grep ros2 parancs segítségével ellenőrizzük, hogy létezik-e a workspace a home directoryban(~). A tantárgyban a workspace-t ros2_ws-nek nevezzük. A név igazából nem számít, de a legtöbb tutorial is ezt a nevet használja, így mi is követjük ezt a hagyományt. Több workspace is használható egyidejüleg, külön source-olható, nagyobb rendszereknél ez kényelmes megoldás lehet. Mi egyelőre maradunk az egytelen ros2_ws-nél. Ha nem létezne a mkdir -p ros2_ws/src parancs segítségével készíthetjük el a workspace és a source mappákat.
Colcon¶
A legfontosabb parancs talán a colcon build. Említésre méltó még a colcon list és a colcon graph. Előbbi listázza az elérhető packageket, utóbbi pedig a függőségekről ad gyors nézetet.
A colcon build számos hasznos kapcsolóval érkezik:
--packages-select: Talán az egyik leggyakrabban használt kapcsoló, utána meggadhatunk több package-t, amit buildelni szeretnénk. Ha nincs megadva, akkor az alapértelmezett, hogy a teljes workspace-t buildeli. A gyakorlatban lesz is egycolcon build --packages-select arj_intro_cpp arj_transforms_cppparancs, ez a két arj package-t buildeli.--symlink-install: A fájlok forrásból való másolása helyett használjon szimbolikus hivatkozásokat. Így elkerülhető, hogy pl. minden egyes launch fájl módosítás esetén újra kelljen buildelni a package-t.--parallel-workers 2: A párhuzamosan feldolgozható feladatok maximális száma, ebben az esetben2. Ha nincs megadva, akkor az alapértelmezett érték a logikai CPU magok száma. Akkor érdemes korlátozni, ha a build nem fut végig erőforrás hiány miatt.--continue-on-error: Nagyobb build esetén, ne álljon meg az első hibás package után. Így ha 100 packageből 1 nem működne, akkor is 99 buildelődik. Ha ez nincs megadva, akkor 0 és 99 közötti package buildelődik, a függőségek és egyéb sorrendiségek alapján.
Source¶
Ahhoz hogy az ROS2 futtatható fájlainkat valóban el tudjuk indítani, be kell állíani a be a környezetet (úgynevezett source-olás), tehát meg kell adni a bash számára, hogy hol keresse az adott futtatható fájlokat, azoknak milyen függőségei vannak stb. Ez egyszerűbb, mint hangzik, csak egy source <útvonal>/<név>.bash parancsot kell kiadni. Korábban írtuk, hogy a worksapce neve nem számít, és valóban, a source megadása után mindegy, hogy fizikailag hol található a futtatható állomány, kényelmesen elindítható egy paranccsal bármelyik mappából.
Mivel a packagek különböző workspace-eken belül egymásra is épülhetnek, az ROS2 bevezette az overlay / underlay elvet. Ez azt jelenti, hogy egyik workspace buildelésekor egy másik workspace már be volt source-olva, annak valamely package-e függ a az előzőleg lebuildelt package-től. Tehát annak funkcionalitása, kódja szükséges a ráépülő package-nek. Ennek megfeleően a source-olás is kétféle lehet:
- A
local_setup.bashscript csak a jelenlegi workspace-ben állítja be a környezetet (source-ol). Tehát nem source-ol szülő (függő) workspace-t. - A
setup.bashszkript viszont alocal_setup.bashparancsfájlt adja az összes olyan workspace-hez, amely a munkaterület létrehozásakor függőség volt.
Note
A tantárgyban nem kell ilyen összetett rendszereket használni, legtöbbször egy ros2_ws is elég.
2. feladat - Package build és használat¶
Emlékeztetőül a mapparendszer.
~/ros2_ws/
├──build
├──install
├──log
└──src/
├── bundle_packages
│ ├── cone_detection_lidar
│ │ ├── launch
│ │ └── src
│ ├── my_vehicle_bringup
│ │ └── launch
│ ├── other bundle package1
│ ├── other bundle package2
│ └── img
└── wayp_plan_tools
├── csv
├── launch
└── src
Nyissunk négy terminált. Az első terminálból most is indítsuk a beépített turtlesim_node szimulátort, ami a turtlesim package-ben található.
ros2 run turtlesim turtlesim_node
Success
A második terminálban ellenőrizzük a ros2_ws/src tartalmát, és ha szükséges klónozzuk, majd buildeljük a példa package-t.
ls ~/ros2_ws/src | grep arj_
cd ~ && test -d "ros2_ws/src/arj_packages" && echo Letezik || echo Nem letezik
A. opció:Ha nincs package (az előzőlsnem ad vissza találatot), akkorgit cloneéscolconbuild.B. opció:Ha van package, de nem a legfrissebb, akkorgit pulléscolconbuild.C. opció:Ha van package és friss is, akkor nincs külön teendőnk.
A. opció:
cd ~/ros2_ws/src
git clone https://github.com/sze-info/arj_packages
cd ~/ros2_ws
colcon build --packages-select arj_intro_cpp
B. opció:
cd ~/ros2_ws/src/arj_packages
git checkout -- .
git pull
cd ~/ros2_ws
colcon build --packages-select arj_intro_cpp
A git checkout -- . az összes esetleges lokális változás visszavonására jó.
A harmadik terminálban futtassuk a cmd_gen_node ROS node-ot.
Először source-olnunk kell, ha saját package-ket használunk:
source ~/ros2_ws/install/setup.bash
Ezután már futtatható a node:
ros2 run arj_intro_cpp cmd_gen_node
A következőképp mozog most a teknős:
Forráskódja elérhető a github.com/sze-info/arj_packages repon.A lényeg, hogy a loop függvény 5 Hz (200 ms) frekvencián fut le, és
void loop()
{
// Publish transforms
auto cmd_msg = geometry_msgs::msg::Twist();
if (loop_count_ < 20)
{
cmd_msg.linear.x = 1.0;
cmd_msg.angular.z = 0.0;
}
else
{
cmd_msg.linear.x = -1.0;
cmd_msg.angular.z = 1.0;
}
cmd_pub_->publish(cmd_msg);
loop_count_++;
if (loop_count_ > 40)
{
loop_count_ = 0;
}
}
Python megfelelője
A C++ kód python verziója szintén elérhető a github.com/sze-info/arj_packages címen. Érdemes összehasonlítani a C++ és a python kódokat.
Nézzük meg az utolsó terminálban a Foxglove segítségével az élő adatokat (itt se felejtsük a source-t):
ros2 launch arj_intro_cpp foxglove_bridge.launch.py
Vizsgáljuk meg Foxglove Studio-val is WebSocketen keresztül (Open connection ws://localhost:8765):
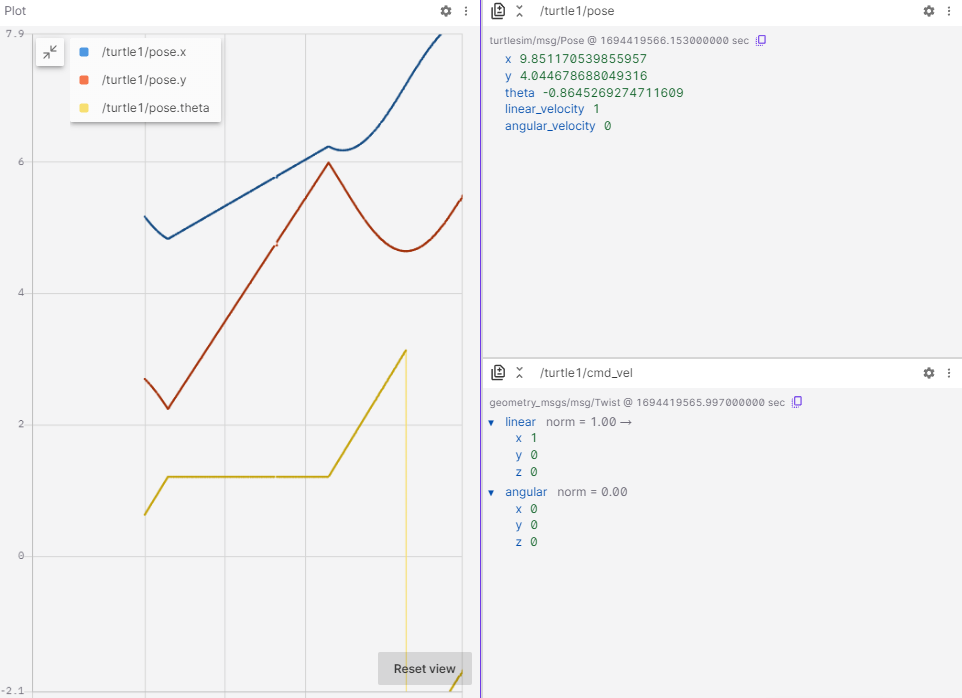
Megjegyzés: gépteremben fel van téve a foxglove_bridge, otthon sudo apt install ros-humble-foxglove-bridge paranccsal (előtte update) telepíthető.
flowchart LR
C[ /turtle1/cmd_vel]:::light --> S([turtlesim_node]):::red
C[ /turtle1/cmd_vel] --> F([foxglove_bridge]):::red
G([cmd_gen_node]):::red--> C
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#152742
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fff
ros2 launch arj_intro_cpp turtle.launch.py
Vizsgáljuk meg a package tartalmát röviden a code ~/ros2_ws/src/arj_packages/arj_intro_cpp parancs után.
3. feladat - Saját package készítése¶
A feladat a hivatalos ROS2 dokumentáción alapul: docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Creating-Your-First-ROS2-Package.html. Készítsük el a my_package nevű ROS 2 package-t.
Python megfelelője
Jelenleg C++ package-t készítünk, de az eredeti tutorial is taralmazza a CMake(c++) package Python megfelelőit.
Első lépés, hogy a a workspace src mappájába lépjünk:
cd ~/ros2_ws/src
Készítsünk egy my_package nevű package-t és egy my_node nevű node-ot.
ros2 pkg create --build-type ament_cmake --node-name my_node my_package
Buildeljük a szokásos módon:
cd ~/ros2_ws
colcon build --packages-select my_package
Majd source:
source ~/ros2_ws/install/setup.bash
És már futtatható is:
ros2 run my_package my_node
# output:
hello world my_package package
Vizsgáljuk meg a my_package tartalmát!
ls -R ~/ros2_ws/src/my_package
# output:
/home/he/ros2_ws/src/my_package:
CMakeLists.txt include package.xml src
/home/he/ros2_ws/src/my_package/include:
my_package
/home/he/ros2_ws/src/my_package/include/my_package:
[empty]
/home/he/ros2_ws/src/my_package/src:
my_node.cpp
tree ~/ros2_ws/src/my_package
# output:
my_package
├── CMakeLists.txt
├── include
│ └── my_package
├── package.xml
└── src
└── my_node.cpp
cat ~/ros2_ws/src/my_package/src/my_node.cpp
#include <cstdio>
int main(int argc, char ** argv)
{
(void) argc;
(void) argv;
printf("hello world my_package package\n");
return 0;
}
ros2 headert nem használ.
Futtatása:
source ~/ros2_ws/install/setup.bash
ros2 run my_package my_node
Alternatívaként VS code-ból is megnyinthatjuk a teljes mappát.
code ~/ros2_ws/src/my_package
Tip
A code parancs után fájlt megadva a fájl niytódik meg, míg mappát (könyvtárat) megadva az adott mappa tartalma nyílik meg. Gyakran forul elő, hogy például egy adott package-ben vagyunk és szeretnénk az aktuális mappát megnyitni. Ezt megtehetjük a code . paranccsal, amikoris az aktuális mappa nyitódik meg, hiszen a . karakter az aktuális mappát jelenti linuxban.
4. feladat - C++ publisher / subscriber¶
Házi feladat
Otthon készítsük el a cpp_pubsub / py_pubsub package-t, ami egy egyszerű publish/subscribe példát valósít meg.
A gyakorlat a hivatalos ROS 2 tutorialokon alapszik: docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Cpp-Publisher-And-Subscriber.html
Hozzuk létre a cpp_pubsub package-t¶
Nyissunk egy új terminált, és source-oljunk a telepítést, hogy a ros2 parancsok működjenek.
Navigáljunk az már létrehozott ros2_ws könyvtárba.
Fontos, hogy a csomagokat az src' könyvtárban kell létrehozni, nem a munkaterület gyökerében. Tehát navigáljunk aros2_ws/src` fájlba, és futtassuk a package létrehozó parancsot:
ros2 pkg create --build-type ament_cmake cpp_pubsub
A terminál egy üzenetet küld vissza, amely megerősíti a cpp_pubsub csomag és az összes szükséges fájl és mappa létrehozását.
Írjuk meg a publisher node-ot¶
Lépjünk a ros2_ws/src/cpp_pubsub/src mappába.
Ez az a könyvtár minden CMake package-ben, ahová a forrásfájlok tartoznak (pl .cpp kiterjesztéssel).
Töltsük le a példa talker kódját:
wget -O publisher_member_function.cpp https://raw.githubusercontent.com/ros2/examples/humble/rclcpp/topics/minimal_publisher/member_function.cpp
Ez a parancs létrehozza a publisher_member_function.cpp fájlt. Nyissuk meg pl VS code segítségével a mappát (code .)
#include <chrono>
#include <functional>
#include <memory>
#include <string>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}
Függőségek hozzáadása¶
Lépjünk vissza egy szinttel a ros2_ws/src/cpp_pubsub könyvtárba, ahol a CMakeLists.txt és a package.xml fájlok már létrejöttek.
Nyissuk meg a package.xml fájlt a szövegszerkesztővel (pl. vs code). Tipp: a teljes könyvtárat is meg lehet, nyitni, ami később pár dolgot egyszerűsít:
code ~/ros2_ws/src/cpp_pubsub/
Mindig érdemes kitölteni a <description>, <maintainer> és <license> tag-eket:
<description>Examples of minimal publisher/subscriber using rclcpp</description>
<maintainer email="you@email.com">Your Name</maintainer>
<license>Apache License 2.0</license>
Adjunk hozzá egy új sort az ament_cmake buildtool függősége után, és illessze be a következő függőségeket a node include utasításainak megfelelően:
<depend>rclcpp</depend>
<depend>std_msgs</depend>
Ez deklarálja, hogy a pacakge-nek szükséges az rclcpp és a std_msgs fordításkor és futtatáskor.
CMakeLists.txt¶
Most nyissuk meg a CMakeLists.txt fájlt.
A meglévő find_package(ament_cmake REQUIRED) függőség alá adjuk hozzá a következő sorokat:
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
Ezután adjuk hozzá a végrehajtható fájlt, és nevezzük el talker-nak, hogy a ros2 run használatával futtassa a node-ot:
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
Végül az install(TARGETS...) részt adjuk hozzá, hogy az ros 2 megtalálja a futtatható állományt, amit lefordítottunk
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
A CMakeLists.txt megtisztítható néhány felesleges szakasz és megjegyzés eltávolításával, így a következőképpen néz ki:
cmake_minimum_required(VERSION 3.5)
project(cpp_pubsub)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
ament_package()
Már buildelhető a package, adjuk hozzá a feliratkozó (subscriber) node-ot is, hogy láthassuk a teljes rendszert működés közben.
cd ~/ros2_ws/
colcon build --packages-select cpp_pubsub
Írjuk meg a subscriber node-ot¶
A subscriber node elkészítését a következő tutorial 3-a pontja is leírja: docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Cpp-Publisher-And-Subscriber.html
Lépjünk vissza a ros2_ws/src/cpp_pubsub/src mappába és töltsük le a sunbscriber node-ot is:
wget -O subscriber_member_function.cpp https://raw.githubusercontent.com/ros2/examples/humble/rclcpp/topics/minimal_subscriber/member_function.cpp
Ha most ls-el listázunk, a következőt kell lássuk:
publisher_member_function.cpp subscriber_member_function.cpp
A CMakeList.txt-hez adjuk hozzá a subscribe node-ot is:
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})
Fordítsuk a package-t¶
cd ~/ros2_ws/
colcon build --packages-select cpp_pubsub
Futtatás:
source ~/ros2_ws/install/setup.bash
ros2 run cpp_pubsub talker
[INFO] [minimal_publisher]: Publishing: "Hello World: 0"
[INFO] [minimal_publisher]: Publishing: "Hello World: 1"
[INFO] [minimal_publisher]: Publishing: "Hello World: 2"
[INFO] [minimal_publisher]: Publishing: "Hello World: 3"
[INFO] [minimal_publisher]: Publishing: "Hello World: 4"
Egy újabb terminalba:
source ~/ros2_ws/install/setup.bash
ros2 run cpp_pubsub listener
[INFO] [minimal_subscriber]: I heard: "Hello World: 10"
[INFO] [minimal_subscriber]: I heard: "Hello World: 11"
[INFO] [minimal_subscriber]: I heard: "Hello World: 12"
[INFO] [minimal_subscriber]: I heard: "Hello World: 13"
[INFO] [minimal_subscriber]: I heard: "Hello World: 14"
5. feladat - Python publisher / subscriber¶
A gyakorlat a hivatalos ROS 2 tutorialokon alapszik: docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Py-Publisher-And-Subscriber.html
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 | |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 | |
Források¶
- docs.ros.org/en/humble/Tutorials/Beginner-CLI-Tools/Introducing-Turtlesim/Introducing-Turtlesim.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Creating-Your-First-ROS2-Package.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Cpp-Publisher-And-Subscriber.html
- docs.ros.org/en/humble/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Py-Publisher-And-Subscriber.html