Bevezetés¶
Rendszerszinten az önvezetés a következő alfunkciók összegeként írható le:

Irodalom: [TU München], [Autoware], [University of Texas at Dallas], [ApolloAuto]
{kind=link}
- Érzékelés: egyszerű driver-program szintű nyers adatok előállításával foglakozik, például egy kamera szenzorból a kép előállítása a rendszer számára.
- Észlelés: ez már összetettebb folyamat, a bemeneti adatokból kinyerni a rendszer számára fontos információkat, például gyalogos felismerése kamerakép alapján.
- Tervezés: a jármű útját, vagy trajektóriáját tervezi meg globális szinten (a szenzorok érzékelési tartományán túl), illetve lokális szinten (a szenzorok érzékelés tartományán belül).
- Szabályozás: a tervező által előállított útvonal, vagy tarjektória lekövetése, például Pure-Pursuit szabályzó, Modell Prediktív Szabályzó (Model Predictive Control, MPC) stb. segítségével.
- Aktuálás: a rendszer által előállított referenciajelek (kormányszög, gáz és fékpedál) kiadása (pl. CAN bus rendszeren).
A fenti beosztás megfigyelhető nagyobb rendszerek, például az Autoware összefoglaló rendszerábráján is. Robotikában ismeretes még a sense-think-act paradigma is. Itt a gondolkodás (think) foglalja össze az észlelést, a tervezést és valamennyire a szabályozást is.
{kind=link}
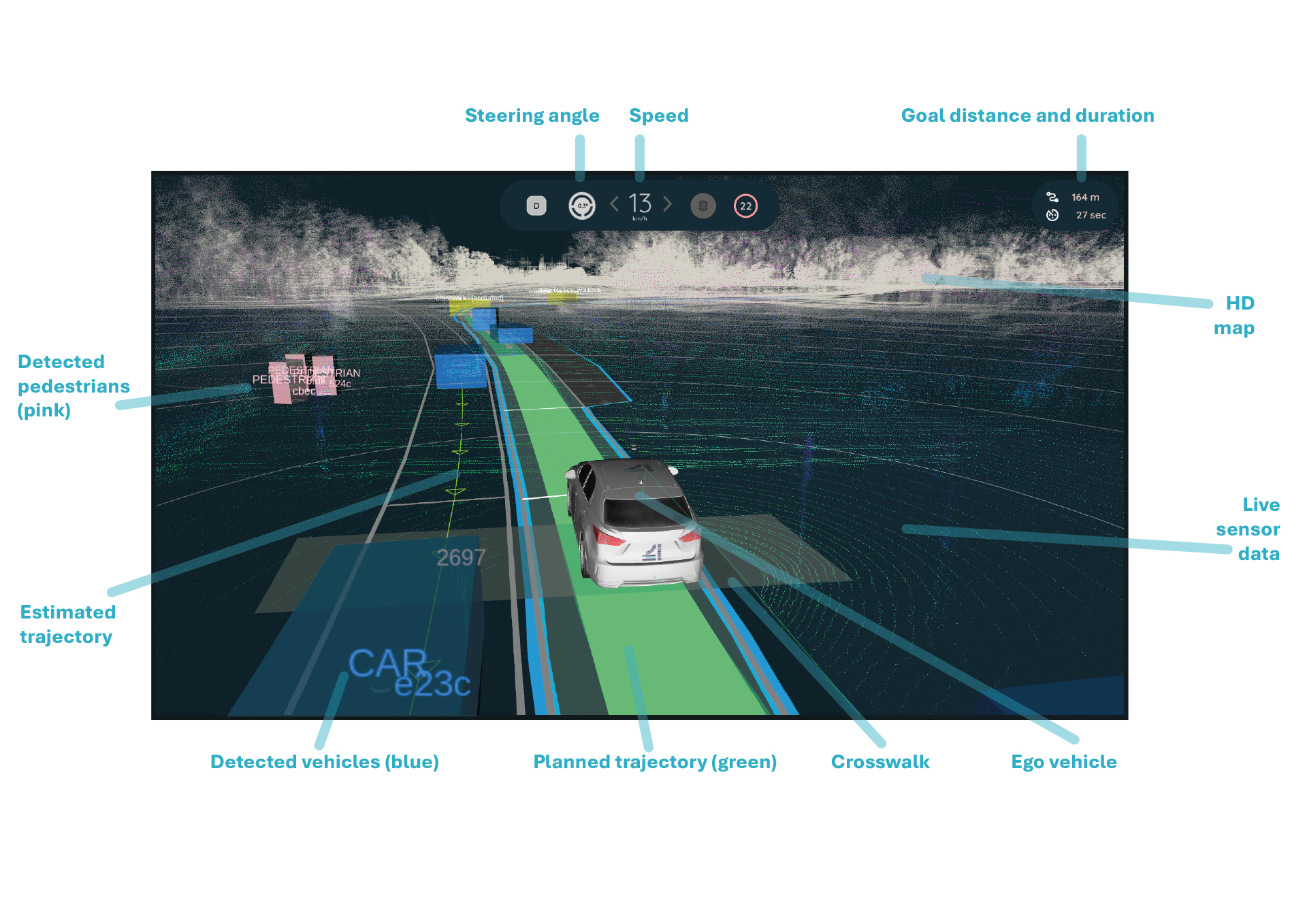
Nézzünk minden részfeladatra egy szemléltetést, az egyetemünk egyik önvezető funkciókkal rendelkező autóján, a zalaegerszegi tesztpályán:
Önvezetés vs. vezetéstámogatás¶
SAE szintek¶
A SAE J3016 szabvány definiálja a sofőr és a jármű rendszere közötti munkamegosztást.
- 0. szint: L0 - No Driving Automation, azaz a vezetésautomatizáció teljes hiánya.
- 1. szint: L1 - Driver Assistance, itt bizonyos vezetéstámogató funkciók már beleszólhatnak a jármű mozgásába.
- 2. szint: L2 - Partial Driving Automation, azaz mindkét irányba történő manővert végez az autó, a felügyelet az emberé.
- 3. szint: L3 - Conditional Driving Automation, itt ha a jármű kéri, a sofőrnek vissza kell vennie az irányítást.
- 4. szint: L4 - High Driving Automation, itt már minden felelősség a járművé, de hagyományos üzemmódban is használható még.
- 5. szint: L5 - Full Driving Automation, Autonomous, itt is a járműé a feleősség, sőt, nem is lehet hagyományos kormánnyal használni.
A szabvány azonban nem íjra le, hogy milyen "scope" / terület a jármű korlátja. Például egy önvezető reptéri busz nem léphet ki a reptér területéről. Ugyanígy a Waymo, Cruise vagy a Zoox robotaxija jellemzően kisebb régióban, magyar hasonlatként nagyjából 1-2 vármegyényi területen működik csak. Ezt nevezzük "geofencing"-nek is.
Példák¶
Ahogy láthattuk, önvezető (autonomous) járművekhez (L5) hasonló technológiák találhatók a vezetéstámogató (automated) szinteken (L2/L3) is. Azonban a feladat komplexitásban teljesen más szintet jelent.
| Szint: | L2/L3 | L5 |
|---|---|---|
| Elnevezés: | Automatizált, vezetéstámogató | Autonóm, önvezető |
| Jellemző szenzorok: | Kamera, radar | Kamera, radar, LIDAR, GPS |
| Példák: | Tesla, Audi, BMW | Waymo, Zoox, Cruise |
Önvezető járművek és robotok¶
| Robotok | Robotaxik |
|---|---|
 |
 |
| Nuro, Segway, Turtlebot, Clearpath, Starship | Zoox, Cruise, Waymo, Navya, Sensible4 |
Nézzünk egy példát, ami a Zoox önvezető robotaxit mutaja be működés közben:
Nézzük meg, hogyan akadályoz meg a Google Waymo önvezető robotaxija különböző baleseteket:
Clearpath Husky Robot működés közben:
Önvezető autó érzékelése a győri campuson:
Bővebben: waymo.com/blog/2025/05/waymo-making-streets-safer-for-vru
Kódsorok¶
Az alábbi ábrából látszik, hogy egy mai átlagos (vezetéstámogatással rendelkező) személyautó igen komplex szoftvermérnöki munka eredménye, azonban az is világos, hogy a jövőben az önvezető járművek még ennél is összetettebb megoldásokat fognak igényelni.
---
config:
themeVariables:
xyChart:
backgroundColor: transparent
titleColor: "#AAAAAA"
xAxisLabelColor: "#43AEC5"
yAxisLabelColor: "#43AEC5"
xAxisLineColor: "#AAAAAA"
yAxisLineColor: "#AAAAAA"
plotColorPalette: "#43AEC5"
---
xychart-beta
title "Millions of Lines of code (LOC) in 2024"
x-axis ["Avg. iPhone app","World of warcraft", "Linux kernel", Facebook, "Avg. new vehicle"]
y-axis "Average number of lines of codes (million)" 0 --> 210
bar [0.04, 5.5, 30, 62, 200]
Egyetemi járművek¶
A Széchenyi István Egyetem szerencsére relatív sok átalakított személygépjárművel, illetve robottal rendelkezik. Ezek a következőek:
Lexus RX450h MY2016+ (autó)¶
Szenzorai: Ouster OS2-64 LIDAR, 2x OS1-32 LIDAR, Stereolabs Zed2i mélységkamera. További információ itt.

Nissan Leaf (autó)¶
Szenzorai: 2x Ouster OS1-64 LIDAR, 2x Velodyne VLP16 LIDAR, SICK LMS111 LIDAR, Stereolabs Zed / Zed2 mélységkamera. További információ itt.

Szenergy (autó)¶
Szenzorai: Ouster OS1-128 LIDAR, SICK LMS111 LIDAR, Stereolabs Zed2i mélységkamera. További információ itt.

A Szenergy csapata európa legnagyobb önvezető versenyén, a Shell Eco-marathon Autonomous Urban Concept (AUC) versenyen 2023-ban első, előtte pedig második helyezést ért el. A doboogós helyezések ezekben az évek ben így alakultak:
| 🏆 | 2022 | 2023 | 2024 |
|---|---|---|---|
| 1. | DTU Road Runners, Technical University of Denmark (Denmark) |
SZEnergy Team, Széchenyi István University (Hungary) |
SZEnergy Team, Széchenyi István University (Hungary) |
| 2. | SZEnergy Team, Széchenyi István University (Hungary) |
Team EVA, Hogeschool Van Amsterdam University (Netherlands) |
H2politO,Molecole Urbane Politecnico Di Torino University (Italy) |
| 3. | DNV Fuel Fighter, Norwegian University of Science And Technology (Norway) |
H2politO,Molecole Urbane Politecnico Di Torino University (Italy) |
Team EVA, Hogeschool Van Amsterdam University (Netherlands) |
Forrás: shellecomarathon.com
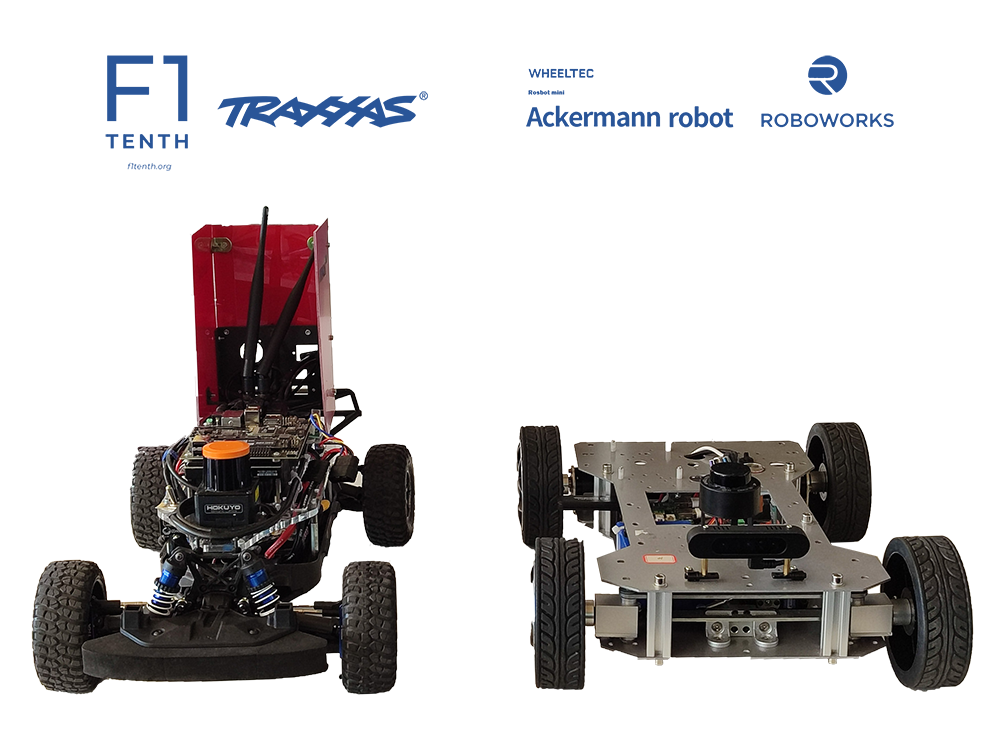
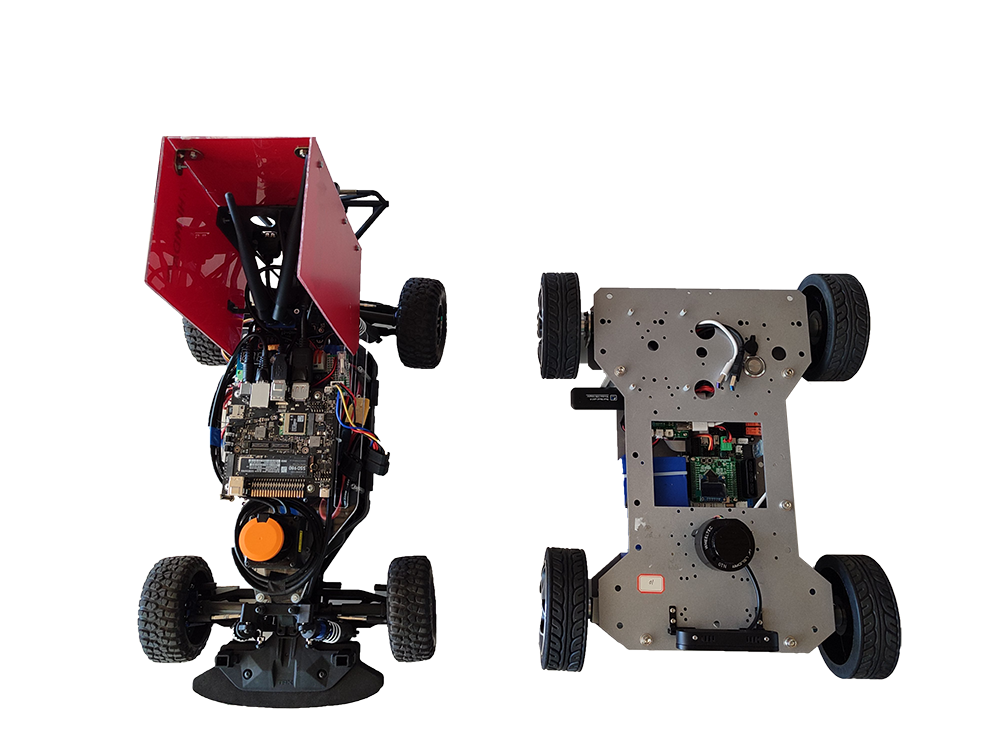
F1/10 (Ackermann robot) / Roboworks Rosbot mini Ackermann¶
Az F1/10 verseny egy autonóm járművekkel kapcsolatos verseny, ahol a résztvevők 1/10-es méretarányú Formula 1-es autómodelleket építenek és programoznak, hogy azok önállóan navigáljanak egy versenypályán. A cél az, hogy a járművek a lehető leggyorsabban és legbiztonságosabban teljesítsék a pályát, miközben elkerülik az akadályokat és a többi autót. A verseny során a résztvevők tesztelhetik robotikai, mesterséges intelligencia és gépi tanulási ismereteiket. A Roboworks robotja az F1/10 jármű méreéhez és szenzorozottságához nagyon hasonló. F1tenth jármű leírás itt.
Traffic Cone Manipulation Robot¶
Szenzorok: Intel RealSense RGB-D camera, IMU, GPS(GNSS)

Segway Loomo (robot)¶
Leírás itt.

Husarion ROSbot 2 Pro (robot)¶
Leírás itt.

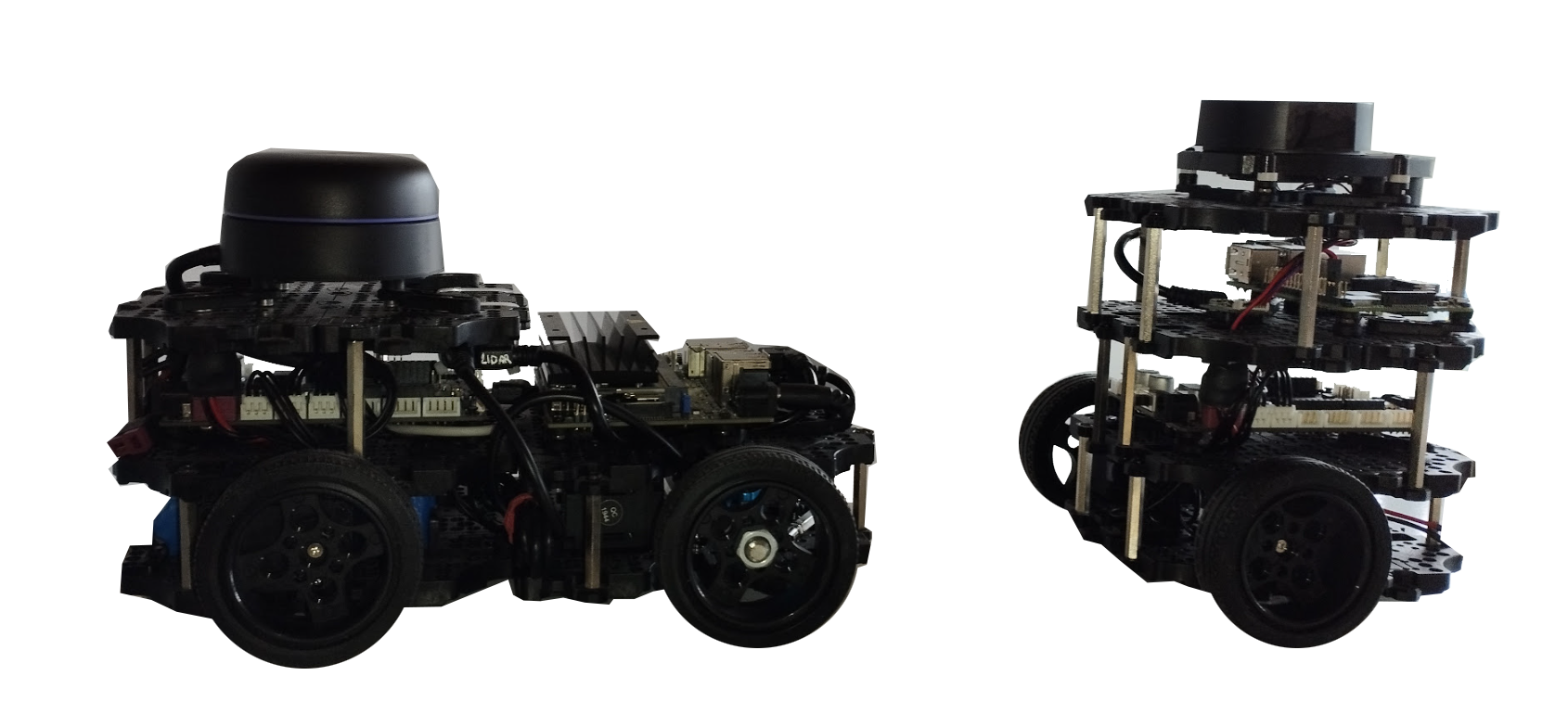
Robotis ROS TurtleBot 3 (robot)¶
Leírás itt.
DJI Matrice 600 Pro drone (robot)¶
Szenzorai: Ouster OS1-64 LIDAR. További információ itt.

